Restez toujours informé: suivez-nous sur Google Actualités (icone ☆)
Les archéologues pourront bientôt conduire des explorations en eaux profondes
L'exploration archéologique en eaux profondes est aujourd'hui pleine de risques et quasiment impossible. Les chercheurs du projet ARROWS, financé par l'UE, tentent d'en faire une solution flexible et abordable.

Lorsque Platon a rapporté le mythe de l'Atlantide, il ne s'attendait probablement pas à ce que cette mystérieuse île submergée fasse l'objet de débats et nourrisse l'imagination populaire pendant plus de 2000 ans. Et pourtant, les idées sur l'Atlantide en disent long sur le mystère qui plane encore sur les fonds marins de notre planète. En effet, nos mers et nos océans regorgent de sites et d'épaves submergés immaculés, mais les archéologues et les chercheurs sont toujours bloqués par les obstacles logistiques et financiers. Il faut donc des solutions flexibles et économiques.
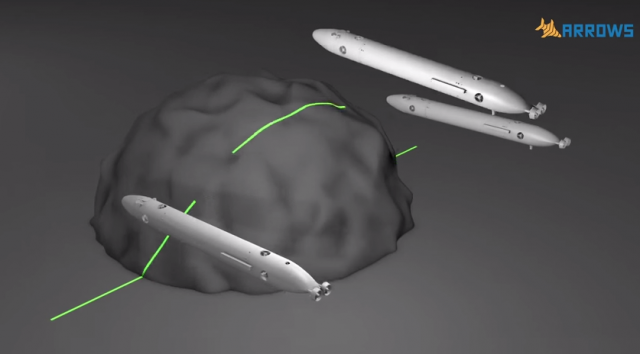
Le projet ARROWS ("Archaeological Robot systems for the World's Seas") a reçu 4 millions d'euros pour dynamiser la recherche dans ce domaine. Il s'appuie sur les solutions de sécurité militaire ou de recherche pétrolière pour créer des sous-marins d'exploration en eaux profondes conçus en fonction des besoins et des attentes des archéologues. Depuis le début du projet en septembre 2012, son consortium de 10 partenaires a conçu trois nouveaux sous-marins autonomes dont U-CAT, un robot s'inspirant des tortues marines, doté d'une grande capacité de manœuvre et destiné à pénétrer dans les épaves. Ces sous-marins et leurs composants dédiés ont des avantages plus qu'alléchants comme une taille et un coût réduits, une polyvalence supérieure, un poids inférieur et une conception plus ergonomique.
Benedetto Allotta, professeur de robotique à l'université de Florence coordonne le projet ARROWS. Il détaille les principaux avantages des sous-marins autonomes conçus par l'équipe du projet, expose le processus de démonstration mené avec la participation active d'archéologues, et discute de leur commercialisation future.
Quels sont les principaux objectifs du projet ARROWS ?
ARROWS veut adapter et développer des sous-marins autonomes économiques, pour réduire notablement le coût des recherches archéologiques tout en couvrant toute la gamme de campagnes archéologiques. ARROWS s'attache à identifier les besoins des archéologues à toutes les phases d'une campagne, et à proposer et démontrer des solutions techniques adéquates.Quel est le rôle des archéologues dans ARROWS ?
D'une part ils ont participé à la spécification, dans l'optique de déterminer les exigences des techniques à développer. Les exigences des sous-marins autonomes qui serviront en archéologie ont été définies par l'Archaeological Advisory Group, un comité constitué d'archéologues européens et s'étendant au-delà du consortium d'ARROWS.D'autre part, les archéologues nous ont aidés pour le choix de scénarios et de sites de démonstration.
Avez-vous rencontré des problèmes durant le projet, et comment les avez-vous surmontés ?
La technologie GPS ne fonctionnant pas sous l'eau, l'un des principaux problèmes de l'utilisation de sous-marins autonomes pour l'archéologie est de géo-référencer correctement les images et les sonagrammes pris sur site. Les archéologues ont besoin d'une exactitude au mètre près, ce qui est très exigeant. La communication est un autre problème qu'il faut résoudre pour disposer d'une équipe de sous-marins hétérogènes mais coopérants. Il faut pour cela utiliser des techniques modernes d'acoustique, qui sont bien plus lentes et moins fiables que les communications radio dans l'air.Quels sont les principaux avantages d'U-CAT par rapport aux autres robots sous-marins ?
U-CAT a été conçu par nos collègues estoniens, dans le but d'être capable de pénétrer dans des épaves (métalliques) modernes. Ses principaux avantages sont: une petite taille qui lui permet de se glisser dans d'étroits passages de l'épave; une forme arrondie sans excroissance, minimisant les risques d'être coincé; un faible poids et une conception ergonomique, qui le rendent utilisable à partie d'un petit bateau; et une grande capacité de manœuvre pour se déplacer aisément dans les pièces et coursives de l'épave. En outre, le coût d'U-CAT est assez faible pour être à la portée des archéologues, et réduire l'impact économique en cas de perte. U-CAT est facile à utiliser bien qu'il exige une formation spéciale en robotique, et il peut fonctionner en contrôle à distance (mode ROV) ce qui élargit sa gamme d'utilisations.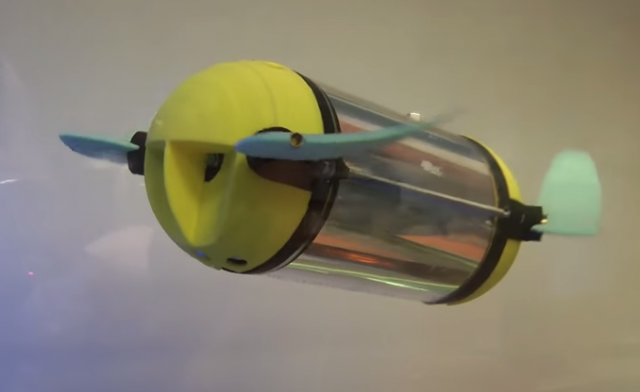
U-CAT Underwater Robot
D'autres techniques ont été développées dans le cadre du projet. Pouvez-vous nous en dire plus ?
Deux autres véhicules ont été développés dans le cadre d'ARROWS: Il s'agit de MARTA ("Marine robotic tool for archaeology"), un sous-marin autonome à coût modéré, conçu par l'université de Florence et doté d'une structure électromécanique modulaire. Cette modularité permet, de démonter en quelques minutes le véhicule et de le remonter avec d'autres configurations de capteurs (sonar ou optique). De même, les batteries sont remplacées très rapidement. Ce véhicule en forme de torpille a un diamètre inférieur (177 mm) aux meilleurs équivalents actuels; et dispose d'un impressionnant équipement de capteurs de navigation pour répondre aux exigences d'un géo-référencement exact. La charge utile de capteurs comprend deux caméras numériques et un sonar d'exploration dirigé vers l'avant. Cependant, il est facile de concevoir et d'installer d'autres modules de charge utile.L'autre sous-marin autonome, nomme A-Sized, a été conçu par la PME italienne Edgelab SRLde La Spezia. Il est aussi en forme de torpille mais d'un diamètre (150 mm) encore plus petit que celui de MARTA. L'approche d'Edgelab a été de concevoir un véhicule vraiment économique, attrayant et facile à déployer, bien qu'avec des performances réduites. Il pèse environ 15 kg, ce qui rend simplifie fortement sa logistique. Ce véhicule est une solution économique très intéressante, pour les archéologues mais aussi pour les scientifiques.
Outre les véhicules, les PME du consortium ont développé des composants pour les sous-marins autonomes. Citons en particulier un outil souple de nettoyage qui sera monté sur un sous-marin autonome plus gros (le Typhoon de l'université de Florence), réalisé en commun par les sociétés NESNE (Turquie) et AMT (Espagne). Il sera testé en Sicile.
L'un des principaux objectifs du projet est de proposer des solutions abordables. Comment y êtes-vous parvenus ?
Nous avons décidé d'utiliser des conceptions personnalisées pour obtenir des véhicules innovants avec le minimum de capteurs coûteux de navigation. Ce concept culmine avec A-Sized, un véhicule réellement économique, aux performances réduites mais doté d'avantages majeurs en termes de logistique et de facilité d'utilisation. MARTA est davantage un compromis entre les coûts, l'exactitude du géo-référencement et la facilité d'emploi, avec l'avantage d'une structure électromécanique modulaire qui permet différentes configurations de véhicule et de charge utile.Vous avez conduit des tests en Méditerranée et dans la mer Baltique. Êtes-vous satisfaits des résultats ?
Il n'a pas été facile de concevoir et fabriquer trois nouveaux véhicules en partant de zéro. Ce n'est pas non plus évident d'assurer les communications et la coopération entre des véhicules différents, mais c'était très important.Jusqu'ici, les tests ont été conduits en Toscane, en Israël, en Croatie et dans la Baltique. Les premiers résultats sont encourageants. Nous préparons actuellement les démonstrations finales, et une campagne est prévue du 26 mai au 6 juin dans l'archipel des Égades (en Sicile). D'autres tests auront lieu en Estonie durant la seconde moitié de juillet. Nous sommes très optimistes quant au succès des démonstrations finales d'ARROWS.
Quand pensez-vous commercialiser les solutions ?
Nous escomptons qu'au moins quelques-unes des solutions développées dans le cadre d'ARROWS seront commercialisées dans les trois ans.Pour plus d'informations, veuillez consulter: ARROWS http://www.arrowsproject.eu/
Populaires