Restez toujours informé: suivez-nous sur Google Actualités (icone ☆)
Des centaines de sphères robotisées qui pourraient un jour explorer des planètes comme Mars vont être testés par des scientifiques. Ces micro-robots pourraient débarquer sur la surface d'une autre planète, disposés dans une capsule comme des oeufs dans leur emballage en carton. Ils pourraient encore être lâchés sur la planète par un ballon flottant au-dessus de la surface. Ils se déplaceraient ensuite en roulant et en rebondissant, mus par des muscles artificiels qui modifieraient leur forme globale.
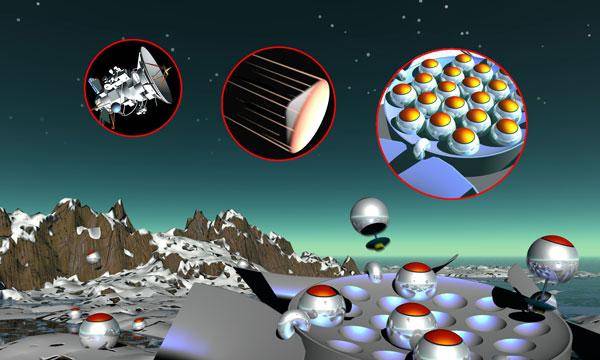
Les micro-robots débarqueraient sur la surface
d'une planète, entassés dans une capsule
Bien qu'une telle mission ne puisse pas être envisagée avant une dizaine d'années au moins, des scientifiques sont déjà pratiquement prêts à tester le concept. Grâce au financement accordé par l'Institut des concepts avancés de la NASA, Steven Dubowsky du MIT et son équipe ont développé un prototype de "micro-bots". Des essais en laboratoire sont programmés pour septembre 2006 puis, dans un an, des grottes situées au Nouveau-Mexique offriront un environnement plus stimulant.
"Les grottes ou les cavernes offrent un terrain de test attractif car un robot explorateur standard ne peut y accéder et encore moins en revenir", explique Dubowsky. Les prototypes des chercheurs sont lestés d'un côté de sorte qu'ils parviennent toujours à se reposer dans une orientation particulière, comme des "culbutos". Cela permet de les positionner par-dessus un dispositif capable de se détendre rapidement pour permettre au robot de bondir.
Un esprit de groupe
Lors de l'exploration de grottes, les micro-robots devront se placer eux-mêmes de façon à permettre les transmissions "profondes". Chacun agirait en tant que relais, en retransmettant les messages vers une unité centrale. Cinquante micro-robots disposés de manière adéquate pourraient théoriquement explorer une caverne d'un kilomètre de profondeur.Le micro-robot de série mesurerait quelques centimètres de diamètre, pèserait environ 100 grammes, et pourrait sauter d'environ 1,5 mètre à chaque bond. Son autonomie de déplacement serait de 50 kilomètres. Chaque robot serait équipé d'un ensemble d'instruments scientifiques, tels que des appareils photo et des spectromètres, et d'appareils de communication.
De forme sphérique, les micro-robots devraient pouvoir aborder des terrains inaccessibles aux rovers planétaires actuels. Ils pourraient également gérer leur recherche collectivement, ce qui implique que la perte de quelques-uns ne compromettrait pas la mission globale.
Les explorateurs robotisés d'aujourd'hui doivent trouver une région plate pour leur atterrissage, pour éviter de basculer, et la perte d'un robot peut coûter des centaines de millions de dollars à une agence spatiale. Comme les micro-robots communiqueraient entre eux et détermineraient potentiellement leur propre objectif, le rôle des équipes de contrôle sur Terre serait modifié, prévoit Dubowsky. Les méthodes existantes sont "très onéreuses et consommatrices de temps", conclut-il.
Populaires