Moment de force (mécanique) - Définition
En mécanique, le terme moment peut désigner plusieurs grandeurs physiques souvent liées à la considération d'un solide :
- les moments de force, moment de flexion, moment de torsion et moment d'encastrement, sont des efforts.
- le moment d'inertie représente la répartition des masses d'un solide autour d'un axe.
- le moment angulaire est lié à la notion de quantité de mouvement
- le moment dynamique est lié à la notion de quantité d'accélération.
- le vecteur vitesse d'un point d'un solide, est le moment du torseur cinématique.
Moment d'une force
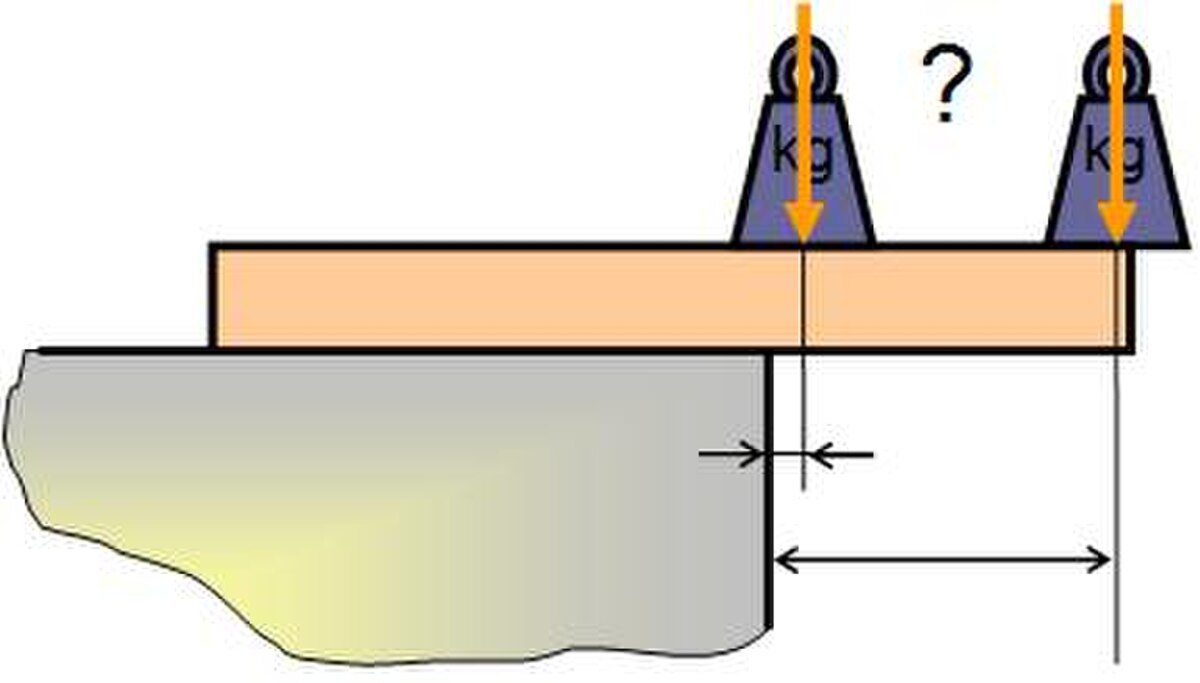
Prenez une planche en équilibre au bord d'un muret. Pour la déséquilibrer on peut poser une charge sur la partie en porte-à-faux. La capacité de cette charge à faire basculer la planche n'est pas la même suivant qu'elle est posée près du muret ou au bout de la planche. De même, on peut au même endroit, placer une charge plus grosse et constater la différence de comportement.
Le pouvoir de basculement dépend donc de l'intensité de la force, mais aussi de la position relative du point d'application et du point de rotation réel ou virtuel considéré.
Ces distinctions sont représentables par le modèle de moment d'une force qui est l'aptitude d'une force à faire tourner un système mécanique autour d'un point donné, qu'on nommera aussi pivot.
Moment par rapport à un point
Expression vectorielle
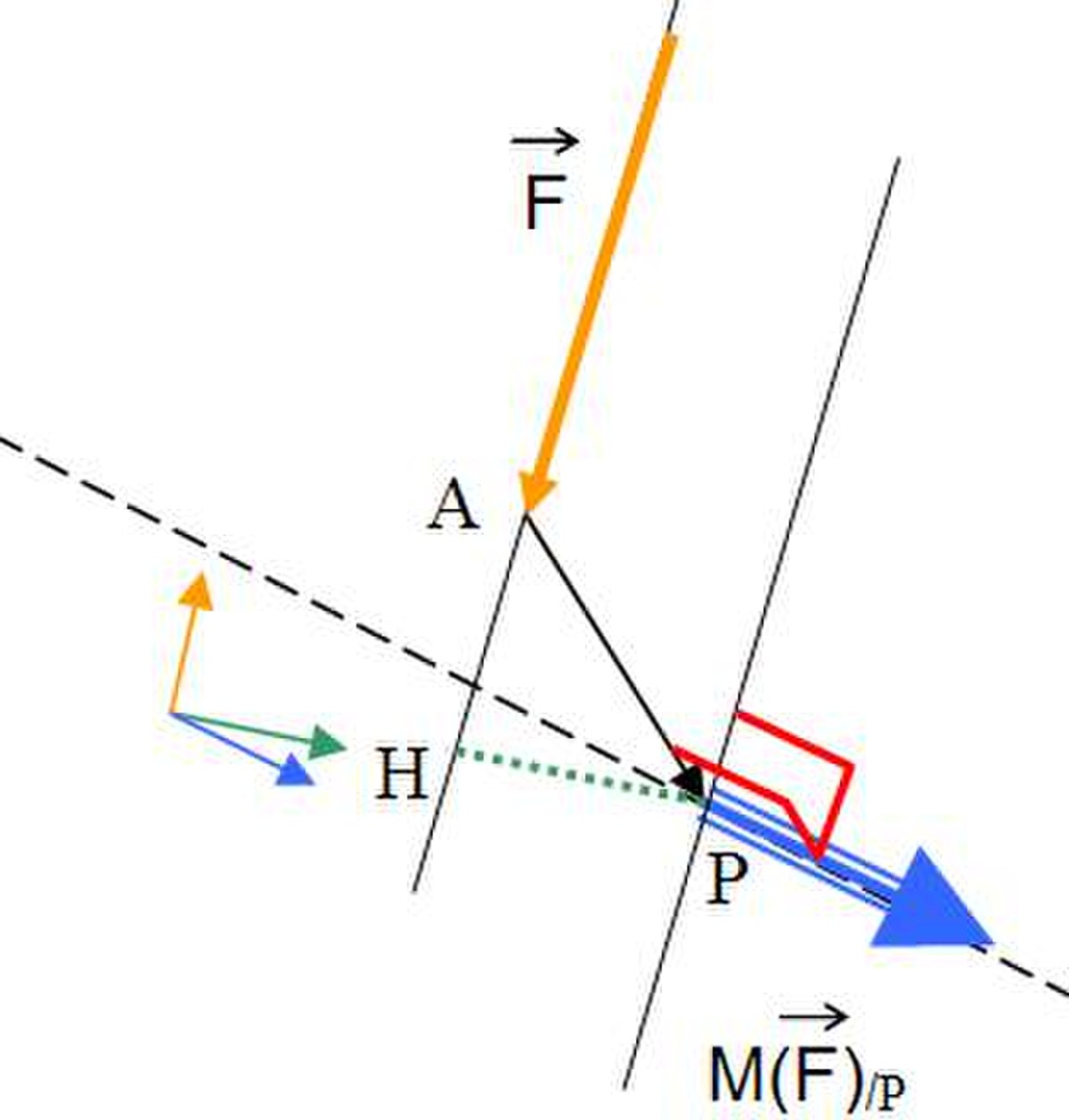
Le moment d'une force ![]() s'exerçant au point A par rapport au pivot P, est le vecteur noté
s'exerçant au point A par rapport au pivot P, est le vecteur noté ![]() :
:
 .
.
où ![]() désigne le produit vectoriel.
désigne le produit vectoriel.
- Remarque sur la notation
- il existe plusieurs variantes de notation des moments de force; certaines (comme sur l'image ci-contre) comportent des parenthèses autour du vecteur, parfois autour de l'ensemble. D'autres ajoutent même à la notation l'élément agissant et l'élément subissant l'action. Une notation plus compacte consiste à nommer la force par la même lettre que celle désignant le point d'application, ce qui rend plus rapide l'identification des cas de nullité de moments.
Ce vecteur est à la fois orthogonal à ![]() et au bipoint
et au bipoint ![]() et finalement normal au plan dans lequel se déroule la rotation que peut provoquer la force, et son sens donne le sens de rotation (la rotation est positive dans le plan orienté par
et finalement normal au plan dans lequel se déroule la rotation que peut provoquer la force, et son sens donne le sens de rotation (la rotation est positive dans le plan orienté par ![]() ).
).
Si d est la distance orthogonale du pivot P à la droite d'action, c’est-à-dire PH, alors sa norme vaut :
 .
.
La longueur d est appelée bras de levier.
Les composantes et la norme d'un moment de force sont exprimées en Newton-mètres (Nm), dans le système international d'unités.
Cas de nullité du moment
Puisqu'il s'agit ensuite d'établir la somme nulle des moments, on peut naturellement s'intéresser aux cas de nullité individuelle des moments de force; de par les propriétés du produit vectoriel:
- la force est nulle;
- le bipoint
 est
est  . La force est donc appliquée en P.
. La force est donc appliquée en P.  et sont colinéaires; alors la droite d'action passe par P, ce qui inclut aussi le cas précédent.
et sont colinéaires; alors la droite d'action passe par P, ce qui inclut aussi le cas précédent.
Formule de transport du moment
Lorsqu'on connaît le moment d'une force en un point, il est possible de le recalculer en n'importe quel point de l'espace. Cette opération est inévitable lorsqu'on manipule les torseurs d'actions mécaniques. Cela revient à poser une rallonge au levier AP. On montre alors la relation suivante:
 .
.
On peut vérifier alors: ![]() .
.
En réalité une force est modélisée par un vecteur (représentant la force) et son point d'application. Il est possible de représenter cette action mécanique par le couple de vecteurs force et moment en un point, qui sont les éléments de réduction du torseur d'action mécanique. La relation d'équilibre liée au principe fondamental de la statique devient une somme de torseurs ; en pratique, on effectuera parallèlement la somme des forces, et la somme des moments tous exprimés au même point, d'où l'intérêt de la formule de transport de moments.
Moment par rapport à un axe
Lorsqu'un solide est animé d'un mouvement de rotation effectif autour d'un axe (cas d'une roue guidée par un palier) il est intéressant de ne considérer que la part utile du moment d'une force. On définit le moment de la force par rapport à l'axe (Δ) par
![M_{\vec{F}/\Delta} = \vec{M}_{\vec{F}/P} \cdot \vec{u} = \left(\overrightarrow{PA} \wedge \vec{F}\right) \cdot \vec u = \left[\overrightarrow{PA}, \vec F, \vec u\right]](https://static.techno-science.net/illustration/Definitions/autres/6/606e3abbb3727190c4fab7b2be3a37ce_647a7e2d14471479838fb56e6eb646e5.png) ,
,
où ![]() est un vecteur unitaire de (Δ), P est un point quelconque de (Δ) et où les crochets dénotent le produit mixte.
est un vecteur unitaire de (Δ), P est un point quelconque de (Δ) et où les crochets dénotent le produit mixte.
En résumé il s'agit de la composante suivant ![]() du moment de
du moment de ![]() calculé en P. De ce fait il s'agit d'un nombre scalaire : "
calculé en P. De ce fait il s'agit d'un nombre scalaire : " ![]() " est une opération de projection sur l'axe
" est une opération de projection sur l'axe ![]() . Sur le plan mécanique, c'est la seule composante (dans le cas d'une liaison parfaite au pivot) susceptible de fournir (ou consommer) une puissance. Le "reste" du moment sera subi par le palier. Cette partie complémentaire intéressera le technologue qui prendra en compte ces valeurs pour le dimensionnement du palier.
. Sur le plan mécanique, c'est la seule composante (dans le cas d'une liaison parfaite au pivot) susceptible de fournir (ou consommer) une puissance. Le "reste" du moment sera subi par le palier. Cette partie complémentaire intéressera le technologue qui prendra en compte ces valeurs pour le dimensionnement du palier.
Le moment par rapport à l'axe est nul si
- le moment par rapport au point est nul (cas général précédent).
- la force est dans la direction de l'axe considéré.
Couple de forces
Si on considère deux forces opposées ![]() appliquée en A et
appliquée en A et ![]() appliquée en B, points distincts d'un même système, il est évident que leur somme est nulle. Qu'en est-il de la somme de leur moment en un point P de l'espace ?
appliquée en B, points distincts d'un même système, il est évident que leur somme est nulle. Qu'en est-il de la somme de leur moment en un point P de l'espace ?
 .
.
On remarque que le résultat est indépendant du point de pivot P considéré. Cette quantité ![]() est appelée couple. Il n'est pas besoin de préciser le point de rotation. Les deux forces constituent alors un couple de forces.
est appelée couple. Il n'est pas besoin de préciser le point de rotation. Les deux forces constituent alors un couple de forces.
Outre les autres cas évidents, le couple est nul lorsque les deux forces ont la même droite d'action. Le couple augmente avec l'intensité commune des forces, mais aussi avec l'éloignement des points. Il est optimal lorsque ![]() et
et ![]() sont orthogonaux.
sont orthogonaux.
Cas général
En réalité le couple n'existe pas intrinsèquement. Il est toujours associé à un ensemble de forces s'annulant vectoriellement mais dont les moments s'ajoutent sans s'annuler. C'est par exemple le résultat de l'action du vent sur une éolienne, ou l'action des forces électromagnétiques sur l'induit d'un moteur électrique.
On ne doit donc pas faire le raccourci " somme des moments = moment de la somme ". Cela n'est vrai que pour un ensemble de forces appliquées au même point. Cela montre enfin qu'une action mécanique n'est pas représentable par un seul vecteur force. La considération du point d'application est primordiale.
Théorème de Varignon
Le moment en P de la résultante ![]() de plusieurs forces
de plusieurs forces ![]() concourantes en A est égal à la somme des moments en P de ces différentes forces :
concourantes en A est égal à la somme des moments en P de ces différentes forces :
 ,
,
avec ![]() .
.
En effet :
En dynamique
En mécanique dynamique, on peut montrer que le moment des forces est la dérivée du moment cinétique par rapport au temps :
Ceci est l'équivalent du principe fondamental de la dynamique (deuxième loi de Newton) en rotation.
On peut aussi montrer que si ![]() est le vecteur vitesse angulaire, c'est-à-dire le vecteur
est le vecteur vitesse angulaire, c'est-à-dire le vecteur
- colinéaire à l'axe de rotation Δ,
- dont la norme est la vitesse angulaire
- et orienté de façon que l'orientation positive d'un plan normal correspond au sens de rotation, alors :
où JΔ est le moment d'inertie du solide par rapport à l'axe de rotation Δ.