Oscillateur harmonique - Définition
Les oscillateurs existent dans de nombreux domaines de la physique : mécanique, électricité et électronique, optique. Le modèle de base des oscillateurs est l'oscillateur harmonique : ses oscillations sont décrites par une fonction sinusoïdale et la fréquence ne dépend que des caractéristiques du système.
Il s'agit d'un modèle. Dans la pratique, ces oscillateurs doivent être entretenus de façon à compenser les dissipations énergétiques.
Oscillateurs mécaniques
Oscillations de translation : système masse-ressort
On peut mettre en oscillation une masse soumise à l'action d'un ressort. On peut suivant les cas, réaliser des oscillations verticales ou des oscillations horizontales (en utilisant un dispositif permettant de minimiser les frottements sur le support).
Dans les deux cas, les oscillations sont harmoniques : la fonction du temps x(t) de la position de la masse de part et d'autre de la position d'équilibre (statique) est une fonction sinus. La période est indépendante de l’amplitude (isochronisme des oscillations) : elle ne dépend de l'inertie du système (masse m) et de la caractéristique de la force de rappel (constante de raideur k du ressort) : ![]()
La constante de raideur k est exprimée en N/m. Pour k = 1 N/m, il faudrait un Newton pour allonger le ressort de un mètre.
Si les oscillations sont amorties par une force de frottement fluide (type visqueux à faible vitesse, force en − αv ), l'équation différentielle du mouvement peut s'écrire :
![]()
Oscillations de rotation : pendule de torsion

Le dispositif est constitué d'une barre horizontale fixée à un support par l'intermédiaire d'un fil de torsion : ce fil d'acier exerce un couple de rappel proportionnel à l'angle de torsion qu'on lui impose : ![]() . Sur la barre on peut positionner deux masselottes de façon symétrique de façon à modifier le moment d'inertie.
. Sur la barre on peut positionner deux masselottes de façon symétrique de façon à modifier le moment d'inertie.
La période est indépendante de l’amplitude (isochronisme des oscillations). Elle est donnée par la relation ci-dessous où J désigne le moment d'inertie de la barre munie des masselottes.
Equation différentielle : ![]()
L'oscillateur harmonique comme modèle
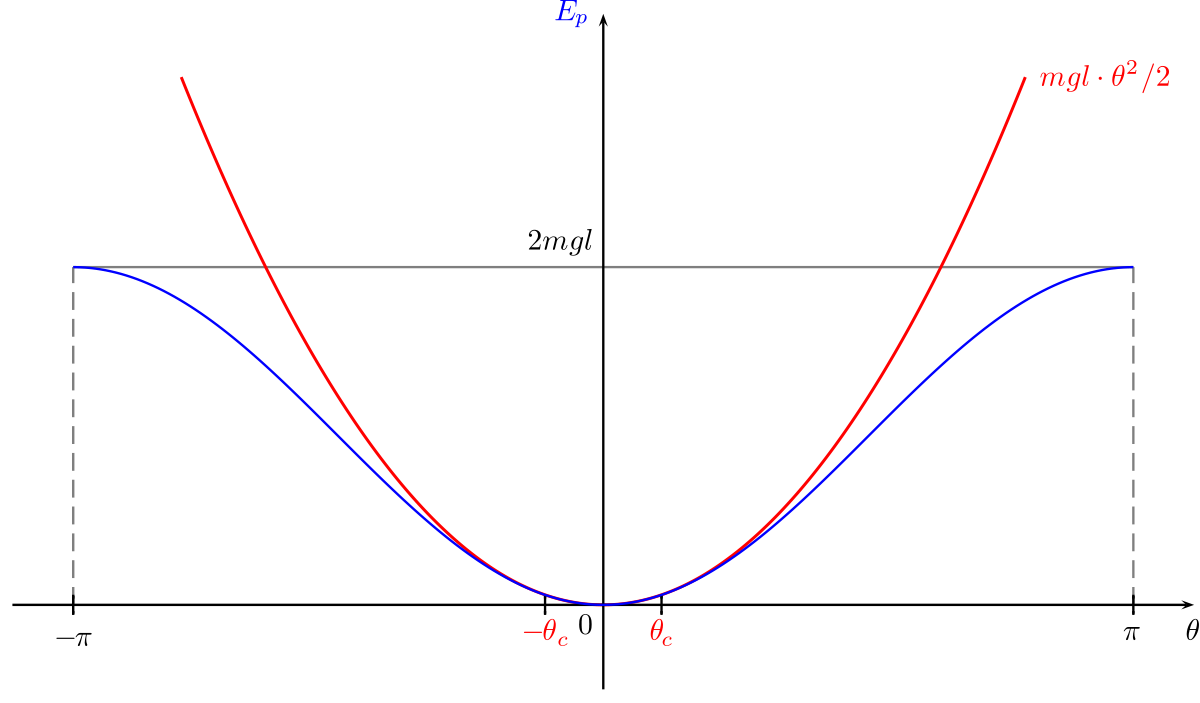
Les oscillateurs ne sont généralement pas harmoniques. Mais, dès que l'énergie potentielle d'un système à une dimension possède un minimum en un point, on peut l'approximer par l'énergie potentielle d'un oscillateur harmonique au voisinage de ce point. Il faut simplement s'assurer que les oscillations autour de ce point sont suffisamment petites pour que l'approximation du puit de potentiel par une parabole soit valide.
Pendule simple
Lorsque les oscillations sont de faible amplitude, l'erreur commise en approximant le puit de potentiel pas une parabole est faible. À titre d'exemple, pour des oscillations telles que l'angle entre la position du pendule et la verticale est de l'ordre de 20°, l'erreur est de 1 %
L'équation du mouvement peut être alors simplifiée et mise sous la forme :
 avec
avec 
d'où une période propre  .
.
Oscillateurs électriques
Circuit LC
Un circuit LC en électrocinétique est un circuit théorique comportant une bobine idéale : parfaitement inductive(inductance L et résistance nulle) et un condensateur (capacité C). Les deux dipôles sont en outre totalement linéaires, ce qui est le cas avec des bobines à noyau d'air mais qui ne l'est pas pour de bobines avec un noyau ferromagnétique.
Un tel circuit se comporte alors comme un oscillateur dont la période propre est : ![]()
De la loi des mailles : ![]() , et des équations caractéristiques des deux dipôles :
, et des équations caractéristiques des deux dipôles : ![]() et
et ![]() , on déduit :
, on déduit :
 , avec
, avec 
L'équation différentielle peut donc s'écrire :
Circuit RLC
Dans un circuit LC réel, on ne peut s'affranchir de la résistance. Celle-ci dissipe de l'énergie par effet joule. Dans ce cas, l'équation différentielle qui régit les oscillations (amorties) peut s'écrire : ![]()
Remarque : on peut entretenir les oscillations grâce à un montage dit à résistance négative.
Analogie électro-mécanique
Les oscillations mécaniques avec amortissement fluide, et les oscillations électriques d'un circuit RLC conduisent à deux équations différentielles du second ordre formellement identiques.
![]()
| Oscillateur générique | RLC | Masse soumise à un ressort |
|---|---|---|
| z | q = charge éléctrique | x = déplacement |
| β | L = inductance propre | m = masse du mobile |
| ρ | R = résistance | α = coef de frottement |
| γ | k = constante de raideur | |
 = période propre = période propre |
||
| f | U = RI : effet Joule |
À voir
- Systèmes oscillants à un degré de liberté.
Bibliographie
- Vladimir Damgov, Nonlinear and parametric phenomena. Applications in radiometric and mechanical systems, World Scientific, Series on Nonlinear Sciences, 2004.