Systèmes robotisés - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
Le bras télémanipulateur européen ou en anglais European robotic arm (ERA) est un bras robotique de manipulation destiné à la Station spatiale internationale (ISS). EADS Astrium SPACE Transportation fournira les systèmes essentiels de ce bras comme les organes terminaux (end-effectors) et les ordinateurs embarqués.
Description
D'une longueur de onze mètres pour une masse de 630 kg, il est capable de déplacer des charges pesant jusqu'à huit tonnes.
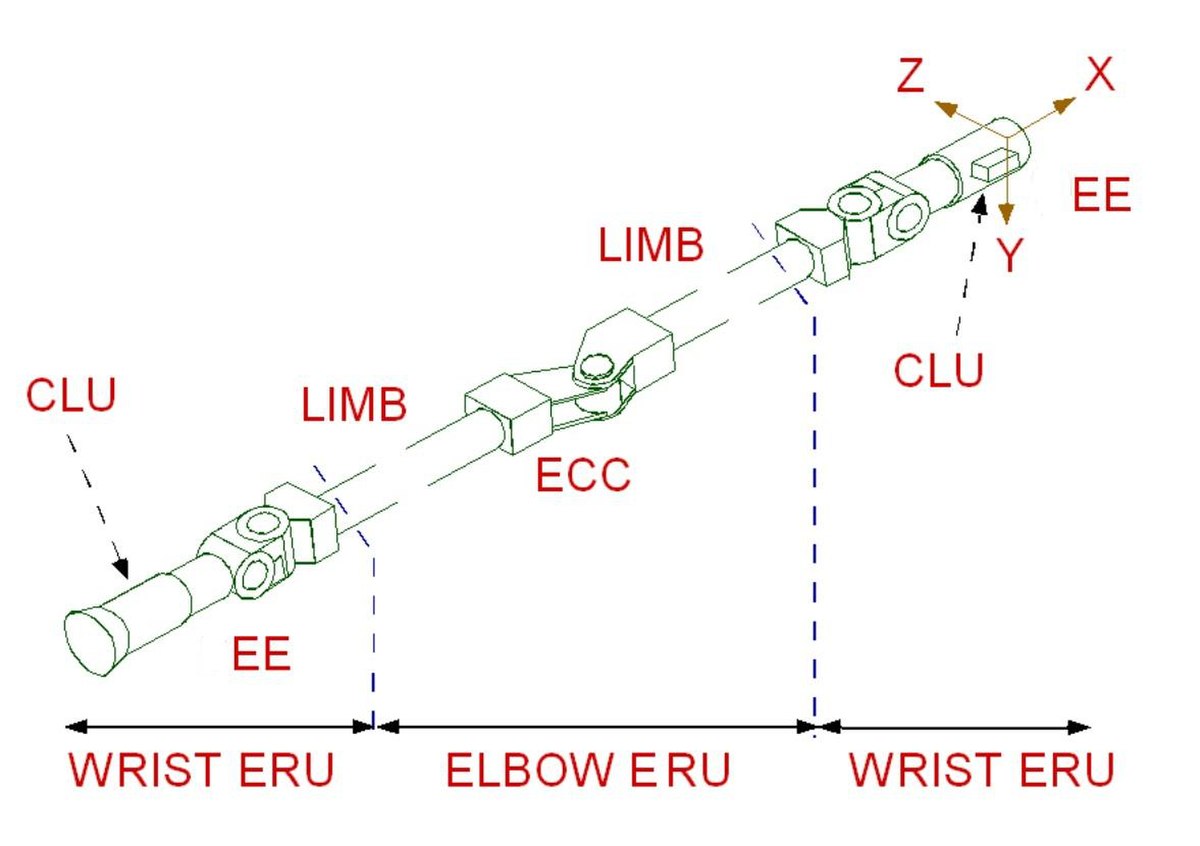
Les deux extrémités du bras robotisé pourront se fixer sur la surface de la station. Le bras effectuera des déplacements en extérieur. Une extrémité se fixera sur un point d'ancrage, puis la deuxième, la première se dégagera alors. Une telle mobilité induit un vaste champ d'action. Le dispositif d'ancrage de l'ERA se trouvera sur une plate-forme mobile se déplaçant le long de rails longeant la structure de la plate-forme.
Les cosmonautes pourront le contrôler depuis l'intérieur de l'ISS, mais aussi depuis l'extérieur.
Chaque extrémité du bras recevra le même dispositif. Ce dernier permettra d'attraper des objets munis du système d'accrochage adéquat. Il se trouvera également muni de caméras vidéo, et d'un outil multi-tâches. Les astronautes pourront également s'en servir pour se déplacer.
L'ESA veut l'utiliser pour l'installation et la maintenance d'équipements. Il devait être livré durant l'été 2006 à la Russie et aurait dû rejoindre l'ISS en novembre 2007.

















































