Vitesse relative - Définition
La liste des auteurs de cet article est disponible ici.
Définitions de la vitesse relative
La vitesse relative d'un mobile M1 par rapport à un mobile M2 est la vitesse de déplacement de M1 observée depuis M2.
Ou bien : la vitesse relative de deux mobiles est la vitesse où ces deux mobiles s'approchent ou s'éloignent l'un de l'autre.
Ou encore : la vitesse relative de deux mobiles est la différence des vitesses de ces mobiles.
Ces définitions précédentes, apparemment simples, de la vitesse relative ne sont pas équivalentes et sous-entendent l'existence de vitesses non relatives, absolues.
Elles ne sont pas non plus rigoureuses, voire fausses, vis-à-vis des principes de la mécanique newtonienne ou de la mécanique relativiste.
Une définition plus scientifique pourrait être : la vitesse relative d'un mobile est sa vitesse dans un référentiel lui même mobile dans un autre référentiel (ce qui est redondant dans une mécanique ne considérant qu'il n'existe pas de repère absolu). La définition scientifique est : la vitesse relative d'un mobile est sa vitesse dans un référentiel. Elle présente l'avantage d'être simple et l'inconvénient de ne pas faire la différence entre une vitesse et une vitesse relative, ce qui clôt prématurément le sujet.
La ou les définitions de la vitesse relative étant maintenant ébauchées, il est intéressant de les préciser en appréciant leur usage en quelques exemples.
Formules de changement de référentiel
Changement de référentiel en mécanique classique
A partir des exemples ci-dessus, on peut considérer que la seule définition de la vitesse relative qui reste indiscutable, si l'on admet un temps universel, est donc :
- la vitesse relative d'un mobile M1 par rapport à un mobile M2 est la variation dans le temps du vecteur position de M1 dans le référentiel de M2.
C'est à partir de cette définition qu'ont été élaborées les lois de composition des mouvements permettant de calculer les vecteurs vitesses, dérivées du vecteur position par rapport au temps et les accélérations, dérivées du vecteur vitesse par rapport au temps.
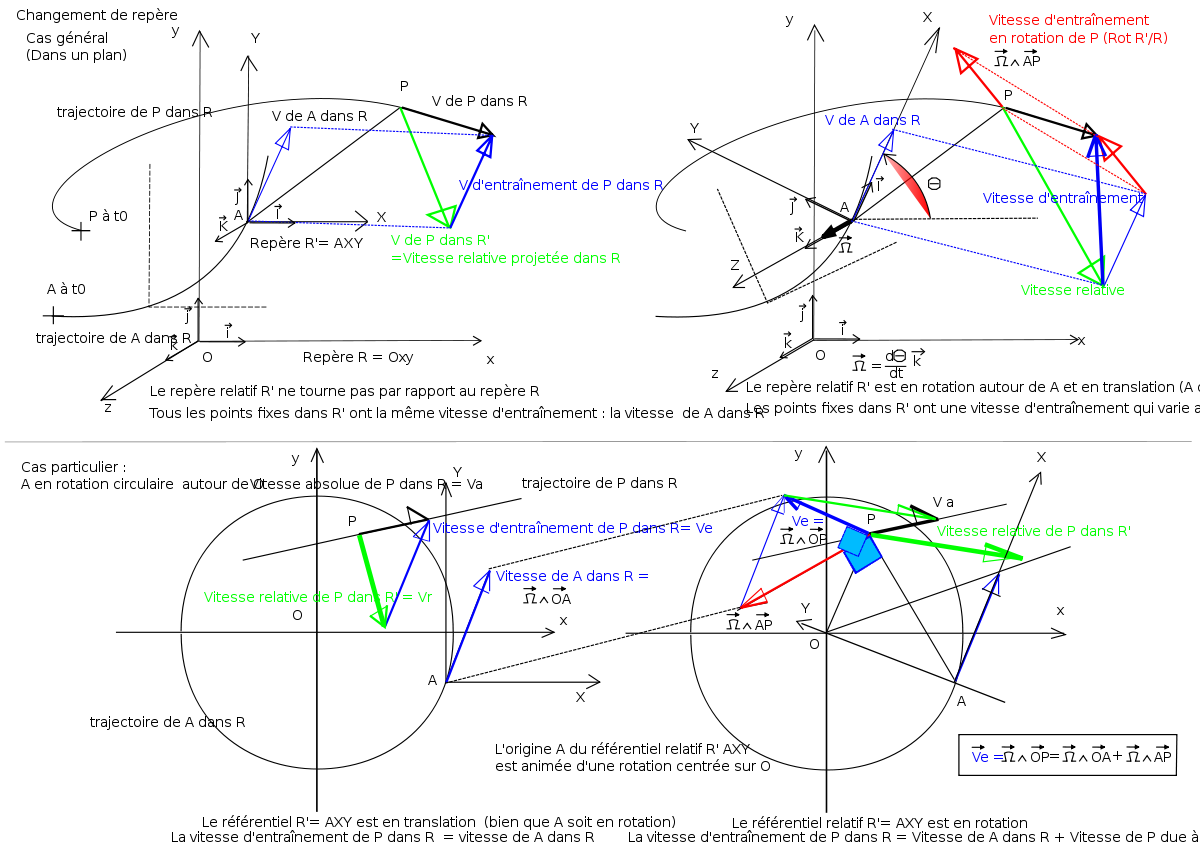
* En haut : cas général (mouvements coplanaires).
* En bas : l'origine du repère relatif est en rotation par rapport à O.
* A gauche : le repère relatif est en translation.
* A droite : le repère relatif est en rotation.
On peut constater sur le schéma 7, que les vitesses relatives dépendent, non seulement du mouvement de l'origine du repère relatif (A sur le schéma 7), mais de l'orientation de ce repère relatif par rapport au repère de référence.
- Les vitesses relatives entre deux mobiles sont liées à la notion d'orientation.
- L'orientation du référentiel relatif peut induire une rotation.
La notion de vitesse d'entraînement est rendue compliquée du fait même de la rotation : ce n'est pas la rotation du point origine du référentiel relatif qui a de l'importance, mais la rotation du référentiel relatif par rapport au repère de référence.
Il se trouve que tout naturellement, du fait du ressenti physique (accélération de la pesanteur, forces centrifuges), nous avons tendance à prendre pour référentiel un repère basé sur notre mouvement et sur ce qui l'influence directement, déterminant ainsi des axes locaux :
- la verticale locale (attraction terrestre),
- les pôles magnétiques terrestres (Nord, Sud).
Ce qui nous complique l'expression mathématique des phénomènes quotidiens.
Les formules mathématiques de changement de référentiel sont cependant simples :
Pour le point P , toutes les dérivations (et les représentations des vecteurs) étant faites dans R :
- sa position dans la repère R étant représentée par le vecteur

- sa position dans le repère R' étant représentée par le vecteur

- la vitesse du point P dans R d'origine O est :

- la vitesse du point P dans R' d'origine A est :

- la rotation de R' par rapport à R étant représentée par le vecteur








Il faut remarquer que cette opération mathématique n'implique aucune spécificité pour le repère R que l'on peut qualifier d'absolu par rapport à R', repère relatif. Il n'est pas forcément immobile.
Cette formule de changement de référentiel, dite aussi de composition des mouvements permettant de comparer les vitesses et les accélérations est cependant dépendante d'une condition importante, celle d'un chronomètre universel, valable dans les différents référentiels.

















































