Noyau de système d'exploitation - Définition
La liste des auteurs de cet article est disponible ici.
Synthèse des principaux noyaux et de leurs architectures
| Noyau | Noyau monolithique | Noyau monolithique modulaire | Micro-noyau | Micro-noyau enrichi | Noyau hybride | Temps réel | Exemples de systèmes d’exploitation associés |
|---|---|---|---|---|---|---|---|
| AIX |

|

|
| AIX | |||
| Amoeba |
|
| |||||
| BeOS |
|
|
| BeOS | |||
| Anciens BSD |
|
|
| BSD | |||
| BSD 4.4 |
|
|
| BSD - Solaris 1 | |||
| Chorus |
|
| |||||
| Fiasco |
|
| GNU/L4Linux/Fiasco | ||||
| HURD |
|
|
| GNU/HURD | |||
| Irix |
|
|
| Irix | |||
| Jaluna |
|
|
| Jaluna/Chorus | |||
| L4 |
|
| GNU/HURD ; GNU/L4linux | ||||
| Linux < 1.2 |
|
|
| GNU/Linux | |||
| Linux > 1.2 |
|
|
| GNU/Linux | |||
| LynuxWorks |
|
|
| GNU/Linux/LynuxWorks | |||
| Mach |
|
| Mac OS X, Darwin, GNU/HURD, GNU/Mklinux | ||||
| Minix |
|
|
| Minix | |||
| NeXTStep |
|
|
| NeXTStep | |||
| Nucleus |
|
|
| Nucleus | |||
| OS/2 |
|
|
| OS/2 | |||
| OS/360 |
|
|
| OS/360 | |||
| QNX |
|
|
| QNX | |||
| RTAI |
|
|
| GNU/RTAI | |||
| RT-OS360/75 |
|
|
| IBM RTOS | |||
| Unix SysVr4 / SunOS 5 |
|
|
| Solaris 7 et suivant | |||
| VxWorks |
|
|
| Windows/VxWorks, BSD/VxWorks | |||
| Windows NT (Noyau de) |
|
|
| Windows NT | |||
| XNU |
|
|
| Mac OS X, Darwin | |||
| Microware OS-9 |
| OS-9 |
Noyaux temps réel
Les noyaux temps réel sont fonctionnellement spécialisés. Ce sont des noyaux généralement assez légers qui ont pour fonction de base stricte de garantir les temps d’exécution des tâches. Il n’y a pas à proprement parler de notion de rapidité de traitement ou de réactivité dans les noyaux temps réel, cette notion est plutôt implicite à la garantie des temps d’exécution en comparaison aux critères temporels de l’application industrielle (la réactivité d’un système de freinage ABS n’a pas les mêmes critères temporels que le remplissage d’une cuve de pétrole).
Très utilisés dans le monde de l’électronique embarquée, ils sont conçus pour tourner sur des plates-formes matérielles limitées en taille, puissance ou autonomie.
Les noyaux temps réel peuvent adopter en théorie n’importe quelle architecture précédemment listée. Ils fournissent souvent deux interfaces séparées, l’une spécialisée dans le temps réel et l’autre générique. Les applications temps réel font alors appel à la partie temps réel du noyau.
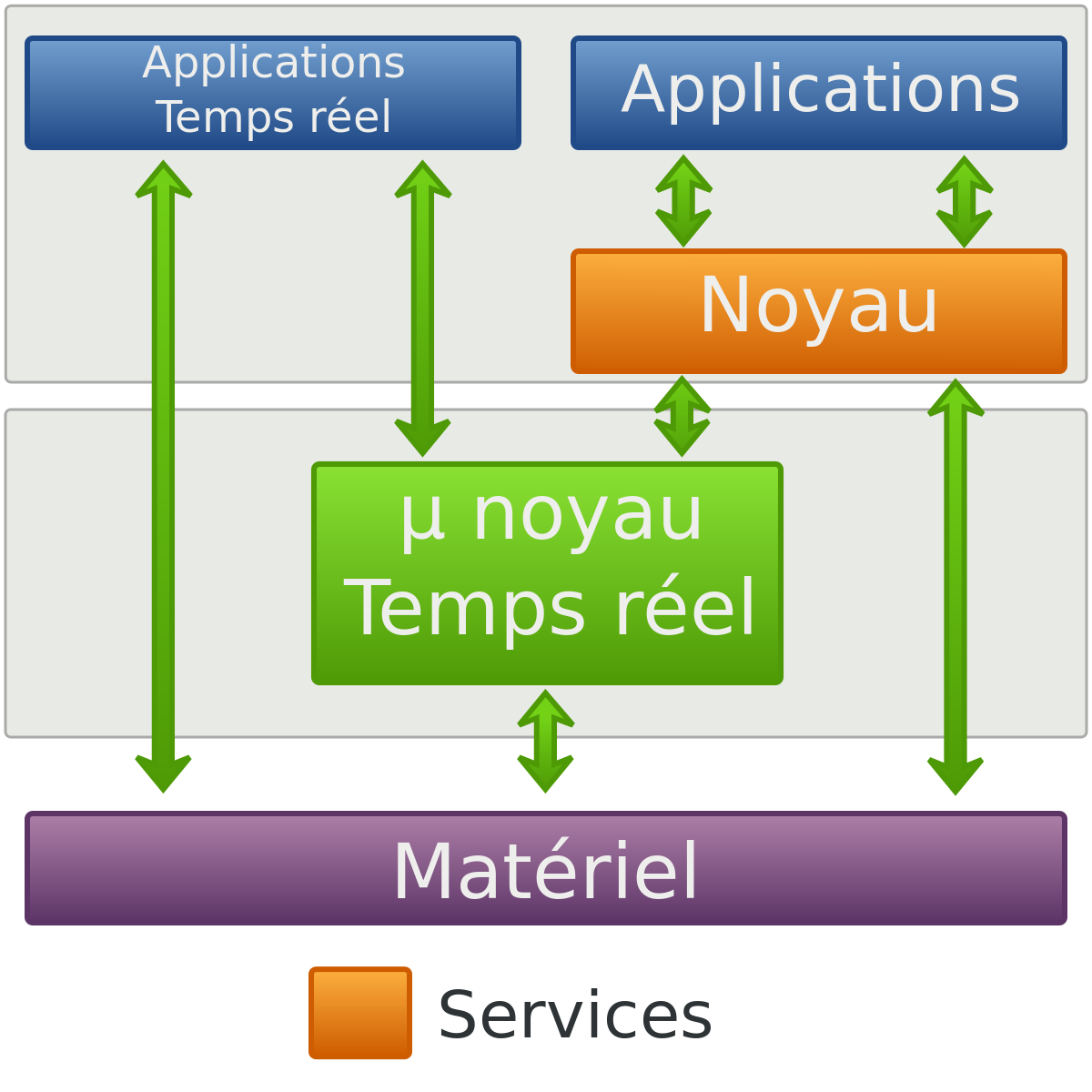
Une des architectures souvent retenue est un noyau hybride qui s’appuie sur la combinaison d’un micro-noyau temps réel spécialisé, allouant du temps d’exécution à un noyau de système d’exploitation non spécialisé. Le système d’exploitation non spécialisé fonctionne en tant que service du micro-noyau temps réel. Cette solution permet d’assurer le fonctionnement temps réel des applications, tout en maintenant la compatibilité avec des environnements préexistants.
Par exemple, on peut avoir un micro-noyau temps réel allouant des ressources à un noyau non temps réel tel que Linux (RTLinux, RTAI) ou Windows. L’environnement GNU (resp. Windows) peut alors être exécuté à l’identique sur le noyau pour lequel il a été conçu, alors que les applications temps réel peuvent faire directement appel au micro-noyau temps réel pour garantir leurs délais d’exécutions.
VxWorks est un noyau propriétaire temps réel très implanté dans l’industrie bien que les systèmes à base de noyau Linux se déploient énormément et aient un succès grandissant via RTAI (RTLinux étant breveté).

















































