Algorithme à estimation de distribution - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
Les algorithmes à estimation de distribution (« Estimation of Distribution Algorithms », EDA, en anglais) forment une famille de métaheuristiques inspirée des algorithmes génétiques. Ils sont utilisés pour résoudre des problèmes d'optimisation, via la manipulation d'un échantillonnage de la fonction décrivant la qualité des solutions possibles. Comme toutes les métaheuristiques utilisant une population de points, ils sont itératifs.
À l'inverse des algorithmes évolutionnaires "classiques", le cœur de la méthode consiste à estimer les relations entre les différentes variables d'un problème d'optimisation, grâce à l'estimation d'une distribution de probabilité, associée à chaque point de l'échantillon. Ils n'emploient donc pas d'opérateurs de croisement ou de mutation, l'échantillon étant directement construit à partir des paramètres de distribution, estimés à l'itération précédente.
Algorithme

Le vocabulaire lié aux algorithmes à estimation de distribution est emprunté à celui des algorithmes évolutionnaires, on parlera donc de « population d'individus » plutôt que d'« échantillon de points », ou de « fitness » plutôt que de « fonction objectif », néanmoins, tous ces termes ont la même signification.
Algorithme général
L'algorithme de base procède de la manière suivante pour chaque itération :
- tirage aléatoire d'un ensemble de points suivant une distribution de probabilité donnée,
- sélection des meilleurs points,
- extraction des paramètres de la distribution de probabilité décrivant la répartition de ces points.
Plus précisément, l'algorithme procède comme suit :
- Tirer au hasard M individus, pour former une population D.
- i = 0
- Tant qu'un critère d'arrêt n'est pas vérifié :
- i = i + 1
- Sélectionner N individus (avec N < M) dans la population précédente (Di − 1), pour former la population :

- Estimer une distribution de probabilité Pi(x), décrivant la répartition de la population
- Tirer au hasard M individus dans Pi(x).

- Fin de la boucle.
Exemple pour le problème « one max »
Dans le problème du « one max », on cherche à maximiser le nombre de 1 sur un nombre de dimensions donné. Pour un problème à 3 dimensions, une solution x = {1,1,0} aura donc une meilleure qualité qu'une solution x = {0,1,0}, l'optimum étant i* = {1,1,1}. On cherche donc à maximiser une fonction

La première étape consiste à tirer au hasard les individus, avec pour chaque variable, une chance sur deux de tirer un 1 ou un 0. Dit autrement, on utilise une distribution de probabilité

Exemple de tirage de la population D0, avec une population de 6 individus, la dernière ligne indique la probabilité p(x) pour chaque variable :
| i | x1 | x2 | x3 | f(x) |
| 1 | 0 | 1 | 0 | 1 |
| 2 | 0 | 1 | 0 | 1 |
| 3 | 1 | 0 | 1 | 2 |
| 4 | 1 | 0 | 1 | 2 |
| 5 | 0 | 1 | 1 | 2 |
| 6 | 1 | 0 | 0 | 1 |
| p(x) | 0.5 | 0.5 | 0.5 |
L'étape suivante consiste en la sélection des meilleurs individus, pour former

| i | x1 | x2 | x3 | f(x) |
| 3 | 1 | 0 | 1 | 2 |
| 4 | 1 | 0 | 1 | 2 |
| 5 | 0 | 1 | 1 | 2 |
| p(x) | 0.7 | 0.3 | 1 |
On constate que les trois paramètres (pi(x)) caractérisant la distribution de probabilité (
| i | x1 | x2 | x3 | f(x) |
| 1 | 1 | 1 | 1 | 3 |
| 2 | 0 | 1 | 1 | 2 |
| 3 | 1 | 0 | 1 | 2 |
| 4 | 1 | 0 | 1 | 2 |
| 5 | 1 | 0 | 1 | 2 |
| 6 | 0 | 0 | 1 | 1 |
| p(x) | 0.7 | 0.3 | 1 |
Et ainsi de suite jusqu'à vérifier un critère d'arrêt (par exemple quand tous les individus sont à l'optimum, comme l'individu 1 du tableau ci-dessus).
Comportement
Il a été démontré (généralement à l'aide de modèles de Markov ou de systèmes dynamiques) que la plupart des versions pour l'optimisation combinatoire sont convergentes (c’est-à-dire qu'elle peuvent trouver l'optimum en un temps fini). Pour les variantes traitant de l'optimisation en variables réelles, la convergence est encore plus facile à démontrer, pour peu que les modèles de distributions utilisées permettent l'ergodicité (c’est-à-dire qu'il est alors possible d'atteindre n’importe quelle solution à chaque mouvement), mais on se satisfait souvent d’une quasi-ergodicité (si la métaheuristique peut atteindre n’importe quelle solution en un nombre fini de mouvements).
Modèles de distributions
Le comportement des algorithmes à estimation de distribution repose en grande partie sur le choix du modèle de distribution utilisé pour décrire l'état de la population. Pedro Larrañaga et ses collègues proposent de classer ces modèles en fonction de leur degré de prise en compte des dépendances entre les variables :
- modèles sans dépendances,
- modèles avec dépendances bi-variantes,
- modèles avec dépendances multi-variantes.
Dans le cas des modèles sans dépendances, la distribution de probabilité est construite à partir d'un ensemble de distributions définies sur une seule variable. Dis autrement, la distribution est factorisée à partir de distributions univariantes, indépendantes sur chaque variable.
L'exemple donné plus haut pour le problème du « one max » rentre dans cette catégorie : la probabilité d'avoir un 1 dans la variable x n'influence pas la probabilité d'avoir un 1 dans la variable x, il n'y a aucune corrélation entre les deux variables.
Les modèles sans dépendances sont simples à manipuler, mais ils ont le défaut d'être peu représentatifs des problèmes d'optimisation difficile, où les dépendances sont souvent nombreuses. Il est possible de traiter les dépendances en dehors du modèle de distribution, mais l'algorithme peut alors devenir plus délicat à manipuler.
Dans le type des modèles à dépendances bi-variantes, il est possible d'utiliser des distributions bi-variantes comme base. Larrañaga et al. proposent alors de classer l'apprentissage dans la notion de structure.
Dans les modèles à dépendances multi-variantes, toutes les dépendances sont prises en compte dans le modèle.

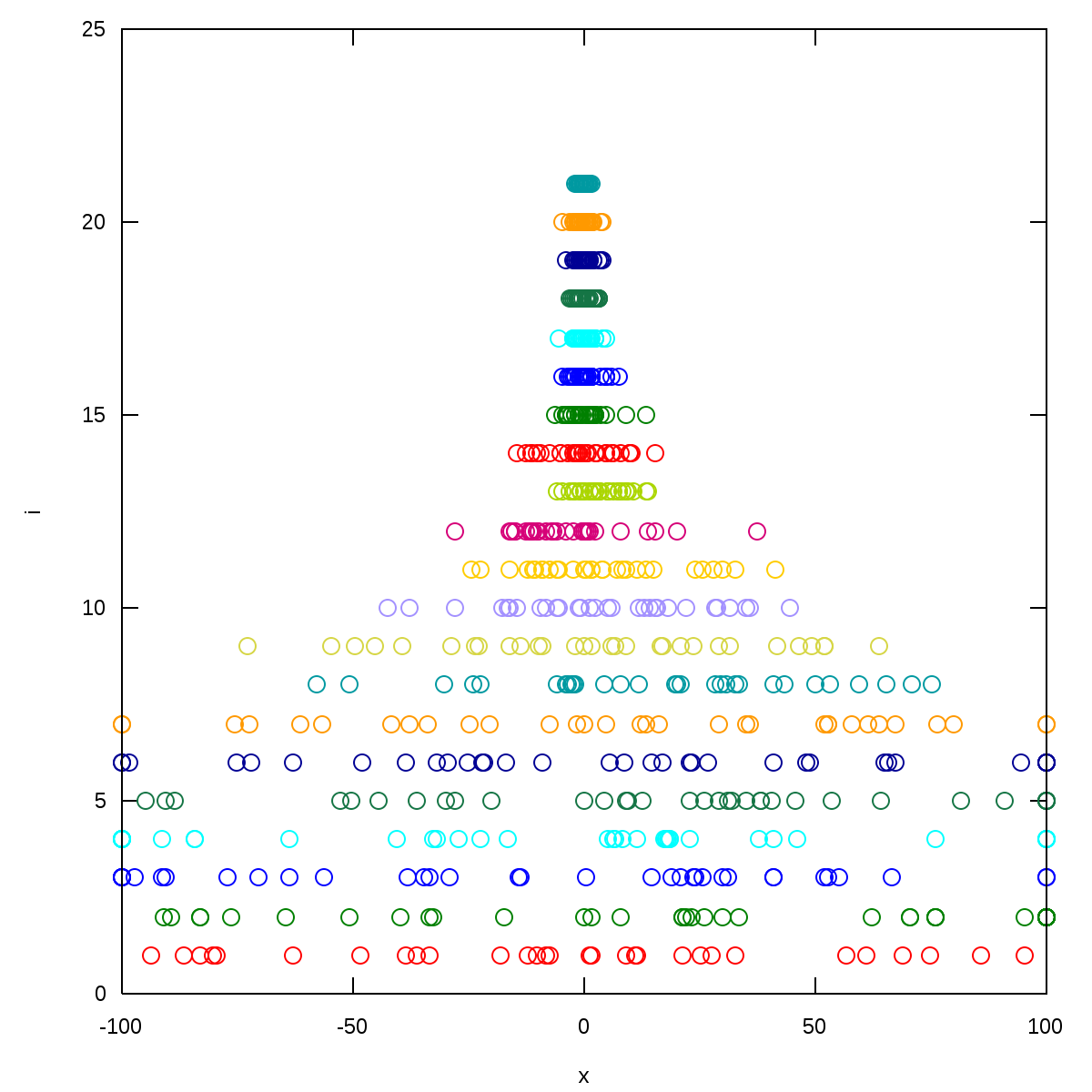
Exemple d'échantillon produit à partir d'une distribution normale bi-variante sans covariance. | 
Exemple d'échantillon produit à partir d'une distribution normale bi-variante avec une covariance de -0.5. |

















































