Application réciproque - Définition
La liste des auteurs de cet article est disponible ici.
Résultats généraux
Définition
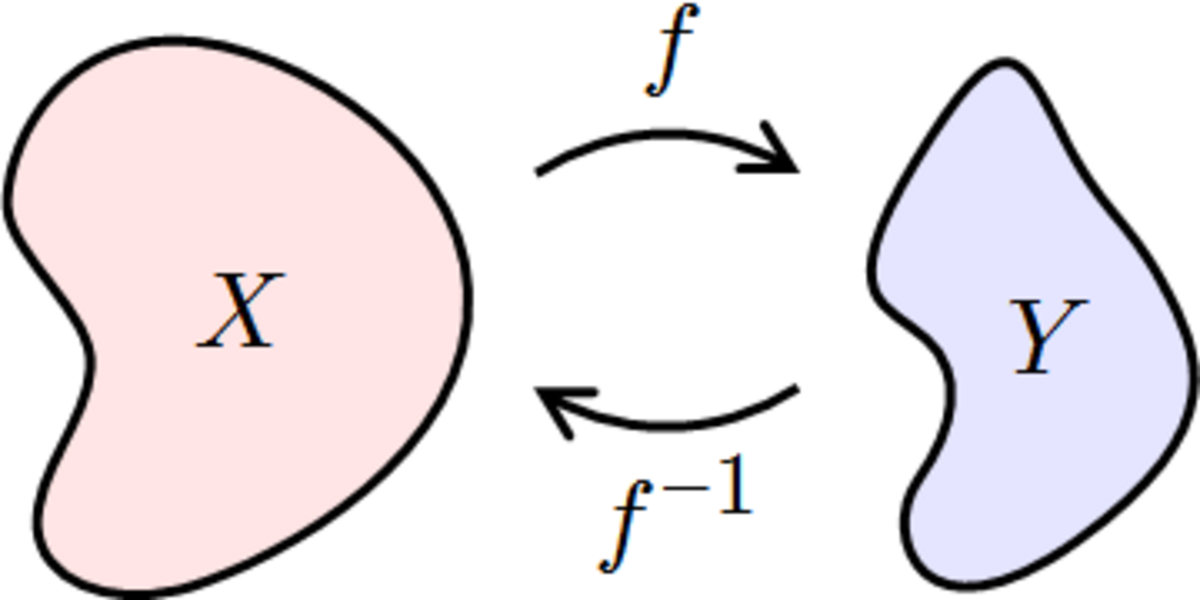
Si f est une application d'un ensemble X vers un ensemble Y et s'il existe une application g de Y vers X telle que :
-




on appelle g l'application réciproque de f et on la note f − 1 .
L'existence d'une telle fonction g n'est possible que si f est bijective :
- chaque élément de l'ensemble d'arrivée doit être atteint par f car

- chaque élément de l'ensemble d'arrivée doit être atteint une seule fois par f car si f(a)=f(b) alors


Une telle application g est alors unique : c'est l'application qui, à tout élément y de Y, associe l'unique antécédent de y par f.
Propriétés
Réciproque de la réciproque
La double propriété :



Réciproque d'une composée
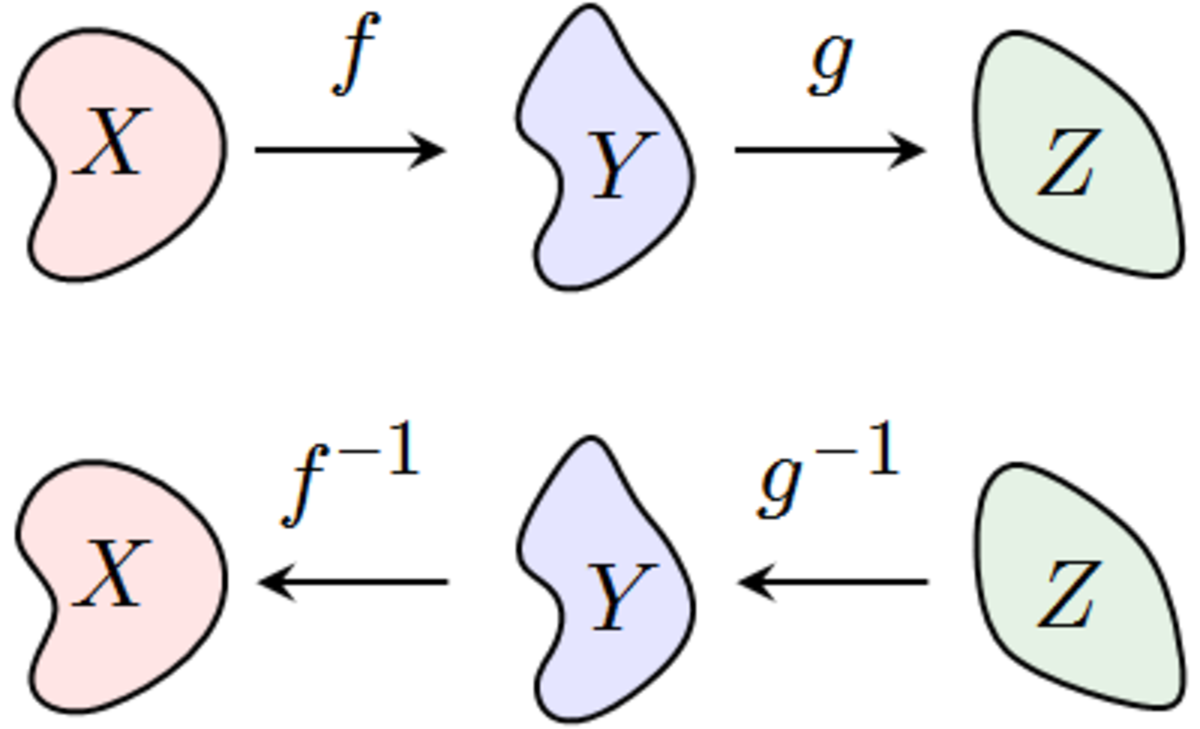
La réciproque de la composée de deux fonction est donné par la formule

Il faut remarquer que l'ordre de ƒ et g a été inversé; pour défaire ƒ suivi de g, il faut d'abord défaire g puis défaire ƒ.
Involution
Certaines application de E vers E sont leur propre réciproque, c'est le cas par exemple de
- :
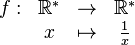

ou de toute symétrie orthogonale dans le plan.
De telles applications sont dites involutives.
Généralisation
Lorsque la fonction f n'est pas bijective, il est possible de définir une relation réciproque définie sur

Pour certaines fonctions f non surjectives, il existe une fonction g telle que

Pour certaines fonctions f non injectives, il existe une fonction g telles que

Réciproque en algèbre linéaire
En algèbre linéaire un morphisme de groupe, d'anneau, de corps, d'espace vectoriel bijectif admet une application réciproque qui est aussi un morphisme de même type. L'application et sa réciproque sont appelés des isomorphismes.
Dans le cas d'une application f linéaire d'un espace vectoriel E vers un espace vectoriel F, tous deux de dimension finie. f admet une application réciproque si et seulement si E et F ont même dimension et si la matrice M de f dans les bases (B1,B2) est inversible. La réciproque de f possède alors pour matrice dans la base (B2,B1) la matrice note M − 1 appelée matrice inverse de M et valant

où det (M) est le déterminant de la matrice M et où tcomM est la transposée de la comatrice de M
Exemple de réciproque de transformation du plan
Les transformations du plans sont les applications bijectives du plan, il est donc intéressant d'en connaitre les réciproques, du moins pour les transformations de références
| Transformation | Transformation réciproque |
|---|---|
Translation de vecteur

| Translation de vecteur

|
| Symétrie de centre O ou d'axe (d) | Symétrie de centre O ou d'axe (d) |
| Homothétie de centre C et de rapport k | Homothétie de centre C et de rapport 1/k |
| Rotation de centre C et d'angle θ | Rotation de centre C et d'angle - θ |
| Similitude directe de centre C, de rapport k et d'angle θ | Similitude directe de centre C, de rapport 1/k et d'angle - θ |
| Similitude indirecte de centre C, de rapport k et d'axe (d); | Similitude indirecte de centre C, de rapport 1/k et d'axe (d); |
| symétrie glissée d'axe (d) et de vecteur
| symétrie glissée d'axe (d) et de vecteur
|
| affinité d'axe (d) de direction (d') et de rapport k | affinité d'axe (d) de direction (d') et de rapport 1/k |

















































