Système d'amarrage sonde-cône - Définition
La liste des auteurs de cet article est disponible ici.
Le système russe

Le système d'amarrage sonde-cône russe a été mis au point en Union Soviétique dans les années 1960 et utilisé pour la première fois avec succès par le vaisseau Soyouz et la station spatiale Saliout 1 en 1971. Depuis il est devenu le système d'amarrage standard utilisé par les vaisseaux (Soyouz et Progress) et les stations spatiales en particulier sur la partie russe de la station spatiale internationale. Il est également utilisé par le vaisseau cargo européen ATV qui ravitaille la station spatiale internationale en s'amarrant au module russe Zvezda. Le diamètre interne du passage ménagé par ce système est de 80 cm.
La jonction entre deux vaisseaux est réalisée lorsque les anneaux d'amarrage des véhicules, qui formeront les parois du tunnel de circulation viennent au contact en superposant parfaitement les mécanismes de verrouillage situés sur leur tranche (8 verrous) ainsi que les différentes liaisons et connexions : 4 prises mâle/femelle pour l'électricité et l'informatique ainsi que 2 canalisation l'une mâle l'autre femelle pour les fluides (ergols). Pour atteindre cet objectif le vaisseau actif doit s'approcher à vitesse réduite en s'alignant parfaitement avec le vaisseau cible et placer la sonde qu'il porte dans le cône porté par l'autre vaisseau.
Sur chaque vaisseau se trouve au centre de l'anneau d'amarrage une des deux moitiés du système d'amarrage :
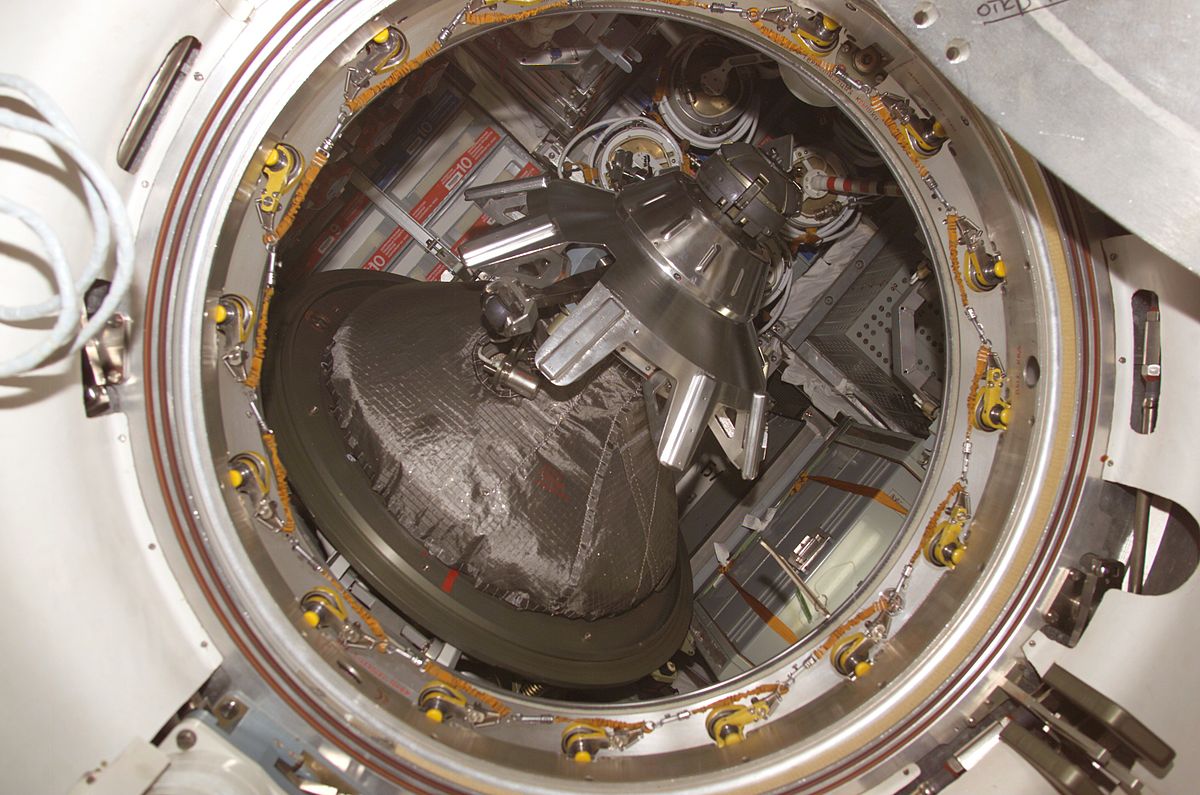
- Le vaisseau actif porte la sonde. Celle-ci est composée d'une tige extensible montée sur cardan. Elle est terminée par une tête sur laquelle se situent des capteurs (au sommet et sur le côté de la tête) et des verrous qui doivent assurer un premier accrochage avec l'autre véhicule. La sonde dispose d'un mécanisme d'amortissement qui doit absorber le mouvement du vaisseau abordeur jusqu'à ce que la vitesse relative des deux vaisseaux soit nulle. A sa base la sonde comporte des guides et capteurs prenant la forme de baleines de parapluie autour de la tige et qui assurent le guidage dans la phase finale de l'amarrage. La sonde est solidaire de l'écoutille mais peut être démontée une fois la jonction réalisée.
- Le vaisseau passif comporte un dispositif de capture constitué d'un cône au fond duquel se trouve un mécanisme permettant de verrouiller la tête de la sonde et des capteurs.
Sur les vaisseaux russes, l'amarrage est une opération automatique avec possibilité de bascule en mode manuel en cas d'anomalie. L'opérateur peut être le centre de contrôle, le pilote (si le vaisseau emporte des passagers) ou une personne située dans la station spatiale qui dispose d'un poste de contrôle à distance. Le guidage est assuré par le système Kours qui repose sur l'utilisation de radars et de réflecteurs. Le processus d'amarrage ne peut être amorcé que si des conditions d'alignement et de vitesse bien précises sont respectées. Pour l'ATV qui utilise ce système pour s'amarrer au module Zvezda de la station spatiale internationale les valeurs sont les suivantes :
- vitesse longitudinale (en direction de l'autre vaisseau) comprise entre 0,05 à et 0,10 m/s : si la vitesse est trop faible le verrouillage de la tête de sonde ne s'effectuera pas.
- distance latérale < 10 cm
- écart angulaire d'alignement entre les axes des 2 véhicules < 5°
- vitesse latérale < 0,02 m/s
La procédure d'amarrage est la suivante (cas de l'ATV) :
- Avant d'entamer la phase d'approche la sonde est déployée. Dans cette position la sonde est susceptible d'être au contact du vaisseau abordé lorsque les deux vaisseaux se trouvent à moins de 74 cm de distance.
- Lorsque les capteurs situés sur la tête de la sonde détectent un contact, une brève impulsion est donnée par les moteurs pour enfoncer la sonde au cœur du cône. Guidée par la forme en cône, la tête se retrouve au fond du cône ou elle est verrouillée. L'amortisseur situé sur la sonde doit absorber le mouvement du vaisseau abordeur.
- La rétractation de la sonde est déclenchée. Les deux vaisseaux se rapprochent tirés par la sonde qui se rétracte : les guides et les capteurs situés sur la sonde assurent l'alignement du vaisseau.
- Lorsque les anneaux d'amarrage des deux vaisseaux viennent au contact les 8 verrous s'enclenchent et exercent une traction suffisante pour que les deux joints toriques situés sur la tranche assurent l'étanchéité.
- Les verrous de la tête de la sonde sont libérés
- Après vérification de l'étanchéité du passage et égalisation des pressions, les écoutilles sont ouvertes de part et d'autre. Le mécanisme de la sonde qui est assez encombrant, est démonté pour libérer le passage. Le cône reste solidaire de l'écoutille.
La manœuvre de séparation nécessite de remettre le système de sonde en place. Les écoutilles sont refermées et le vide est effectué dans le tunnel entre les deux vaisseaux. Après libération des verrous, le mouvement de séparation est amorcé par des poussoirs montés sur ressort et situés sur la tranche des anneaux d'amarrage. Lorsque le vaisseau en mouvement a atteint une distance de sécurité (variable selon le poste d'amarrage), la propulsion est utilisée pour s'éloigner. Si le système d'amarrage ne libère pas le vaisseau, différentes solutions de secours sont prévues. Si toutes échouent, un système pyrotechnique permet au vaisseau de se séparer de son système d'amarrage.

















































