Tenseur métrique - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
sur les tenseurs
Tenseur
Tenseur (mathématiques)
Produit tensoriel
... de deux modules
... de deux applications linéaires
Algèbre tensorielle
Champ tensoriel
Espace tensoriel
Convention d'Einstein
Tenseur métrique
Tenseur énergie-impulsion
Tenseur de Riemann
... de Ricci
... d'Einstein
... de Weyl
... de Levi-Civita
... de Killing
... de Killing-Yano
... de Bel-Robinson
... de Cotton-York
Tenseur électromagnétique
Tenseur des contraintes
Tenseur des déformations
Modules
Algèbre extérieure
En géométrie et plus particulièrement en géométrie différentielle, le tenseur métrique est un tenseur de rang 2 qui est utilisé pour la mesure des distances et des angles. Il généralise le théorème de Pythagore. Dans un système de coordonnées donné, le tenseur métrique peut se représenter comme une matrice, généralement notée G. Dans ce qui suit, la convention de sommation d'Einstein est utilisée.
Définition
Le tenseur métrique est un tenseur de rang 2 (c'est-à-dire une forme bilinéaire) défini sur un espace vectoriel E de dimension finie:

g est :
- symétrique :

- non dégénérée :
![\left[\forall \mathbf{v} \in E, g(\mathbf{u},\mathbf{v})=0 \right] \Rightarrow \mathbf{u}=0](https://static.techno-science.net/illustration/Definitions/autres/9/986f0abf50fc82c179f2b7768c79d359_24e87b6f84180f906daed1ddb48a91cc.png)
- définie positive:


![\left[\forall \mathbf{v} \in E, g(\mathbf{u},\mathbf{v})=0 \right] \Rightarrow \mathbf{u}=0](https://static.techno-science.net/illustrationWebp/Definitions/autres/9/986f0abf50fc82c179f2b7768c79d359_24e87b6f84180f906daed1ddb48a91cc.png)

On note le produit scalaire de 2 vecteurs uiei et vjej de la manière suivante:

La notation gij est conventionnellement utilisée pour les composantes du tenseur métrique.
Coordonnées rectilignes
Nous supposons ici une base quelconque,

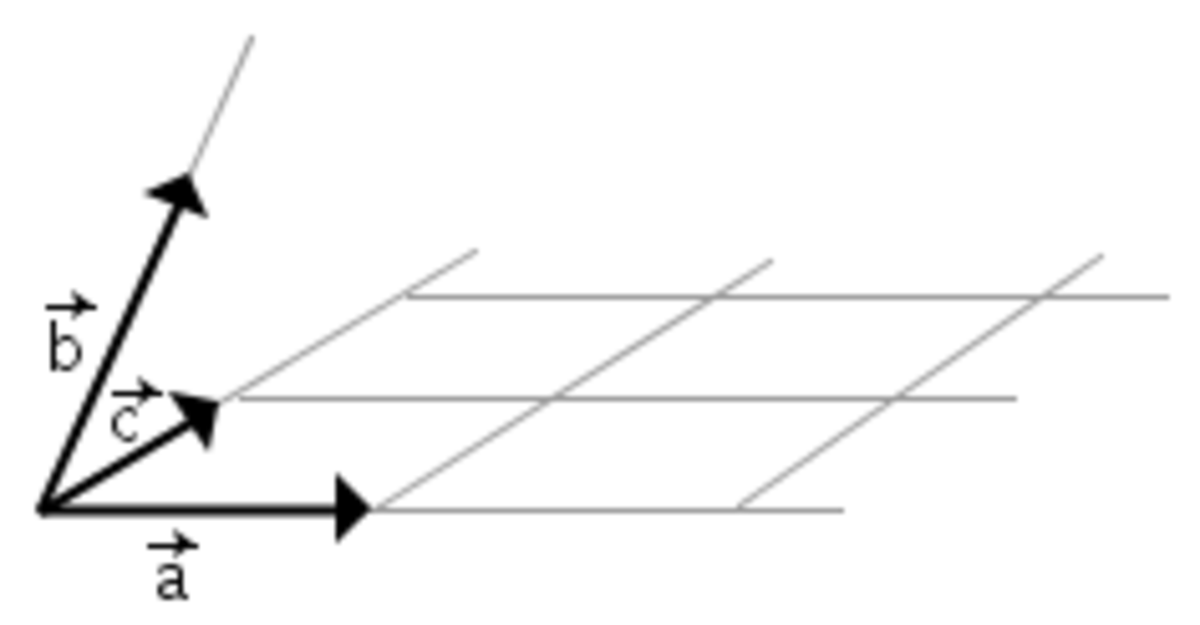

où



Pseudo-métrique
Lorsque g(x,x) n'est pas toujours positif, on peut parler de pseudo-métrique, c'est par exemple le cas de l'espace de Minkowski. Dans ce cadre, le produit scalaire g(x,x) (que l'on note η(x,x)) représente la pseudo-norme au carré. On note s la distance minkowskienne entre deux points P1 et P2 définie par:

avec, pour l'espace de Minkowski, comme matrice du produit scalaire :

et ds2 la distance minkowskienne au carré entre deux points infiniment voisins :

Pour un vecteur x d'un tel espace, nous avons les définitions suivantes :

Une courbe de cet espace-temps décrite par l'équation (x0(τ),x1(τ),x2(τ),x3(τ)) où τ est un paramètre, admet comme vecteur tangent dxμ / dτ. Le signe de la pseudo-norme de ce vecteur est idépendant du choix de τ et nous avons les définitions suivantes (cf. relativité restreinte) :

Montée et descente d'indices
Le tenseur métrique sert à monter ou à descendre les indices des coordonnées de vecteurs / formes différentielles / tenseurs. Prenons le cas du vecteur









Cas des coordonnées curvilignes
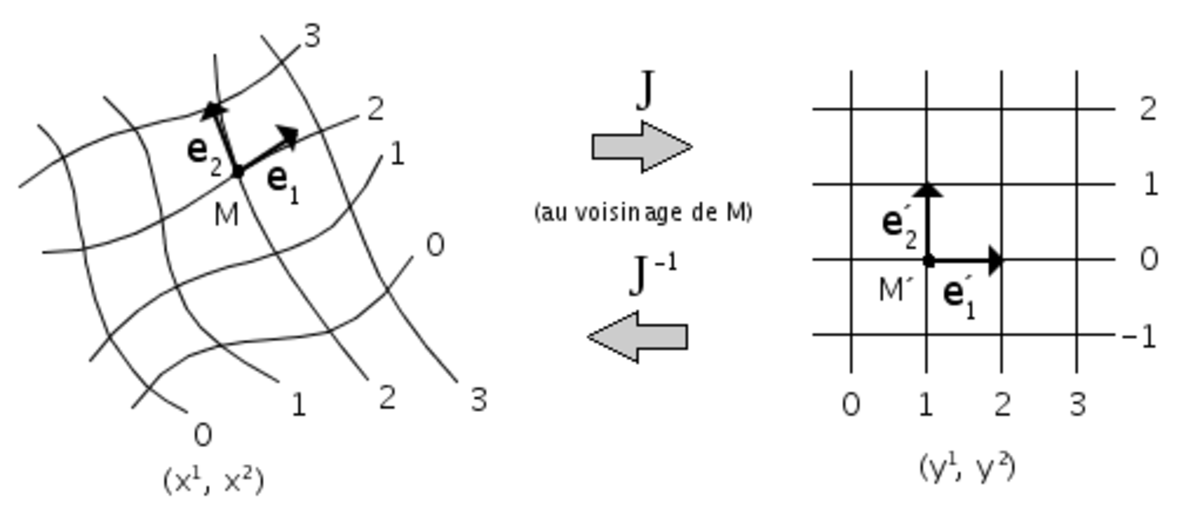
Lorsqu'il s'agit d'un système de coordonnées curvilignes, nous ne pouvons pas définir de base à ce repère à proprement parler. Les vecteurs de cette base ei varient en fonction des coordonnées xi d'un point. Il n'est donc pas possible de calculer un tenseur métrique constant. Cependant la matrice jacobienne J fournit une approximation linéaire de ce type de transformation au voisinage d'un point, la base locale, (e1,e2), étant simplement les vecteurs tangents aux axes de coordonnées. Il suffit donc de calculer les n2 produits scalaires possibles de ces vecteurs tangents (composantes contravariantes de la jacobienne) pour obtenir le tenseur métrique G. Ceci revient à calculer JTJ.
G devient alors un champ tensoriel. Le « champ de base » ainsi utilisé repère des vecteurs infinitésimaux, ceci se traduisant par un « produit scalaire infinitésimal ». On adopte alors l'écriture suivante: ds2 = gijdxidxj (où ds désigne la variation de la norme et non pas celle du produit scalaire comme on pourrait le penser). La quantité s est aussi appelé abscisse curviligne.
Détails de calcul
Pour calculer le tenseur métrique à partir des équations donnant la relation entre l'espace considéré et un espace cartésien, c'est-à-dire un espace pour lequel gij = δij (cfr. delta de Kronecker), il faut calculer la matrice jacobienne de ces équations. Le tenseur métrique est le produit de sa transposée par elle-même:

En appliquant la même opération à partir des équations donnant la relation entre l'espace cartésien et l'espace considéré, on obtient alors l'expression contravariante du tenseur. On peut alors retrouver son expression covariante en sachant que


















































