Orientation (mathématiques) - Définition
La liste des auteurs de cet article est disponible ici.
Orientation d'une courbe
L'orientation d'une courbe (en toute rigueur, différentiable) est imposée par le choix d'une paramétrisation. Une courbe a exactement deux orientations. Intuitivement, l'orientation d'une courbe est un sens de parcours : si on se représente une courbe par une route à double sens, il y a deux façons différentes de la parcourir suivant le sens dans lequel on roule. Formellement, deux paramétrisations définissent la même orientation lorsque les vecteurs dérivés sont positivement proportionnels ; on définit ainsi une relation d'équivalence sur l'ensemble des paramétrisations d'une courbe, et on dispose de deux classes d'équivalence distinctes, appelées orientations. Si c(t) est un paramétrage de la courbe (t est un paramètre réel), le sens direct est le sens dans lequel t augmente. L'application t

Pour une courbe définie dans un espace vectoriel réel euclidien E, l'abscisse curviligne est une version orientée de la longueur. A une constante additive près, sa définition dépend d'un choix arbitraire de signe qui correspond exactement au choix d'une orientation de la courbe. L'abscisse curviligne augmente quand on parcourt la courbe dans le sens direct, et diminue donc dans l'autre sens. On peut choisir librement son origine, c'est-à-dire le point où elle prend la valeur 0. L'abscisse curviligne est alors positive ou négative selon qu'on est en deçà ou au-delà de l'origine.
Un premier exemple parlant est celui du cercle unité. Il est vu comme une courbe de R2 définie par :
-
![c(t)=\left[\cos(t), \sin(t)\right]](https://static.techno-science.net/illustration/Definitions/autres/2/241d6a003d931a1161343148ebbc1dd0_035512452ddedbe36613a1ce6f4e1989.png)
![c(t)=\left[\cos(t), \sin(t)\right]](https://static.techno-science.net/illustrationWebp/Definitions/autres/2/241d6a003d931a1161343148ebbc1dd0_035512452ddedbe36613a1ce6f4e1989.png)
Ce paramétrage naturel définit une orientation du cercle unité, appeléé orientation trigonométrique ou sens anti-horaire.
Un exemple plus élémentaire est une droite affine D d'un espace vectoriel réel E (éventuellement de dimension infinie). Les paramétrages classiques sont donnés par le choix d'un point M de D et d'un vecteur directeur v de D ; le paramétrage correspondant est t
Orientabilité et orientation pour une variété
Considérons une variété topologique de dimension n. Étant donnée une orientation de Rn, chaque carte permet d'orienter le morceau de la variété qu'il décrit. Toutefois, pour la variété prise globalement, il n'y pas de raison pour que les graphes se recouvrant voient leur orientation s'accorder. Les variétés, telles que la sphère, où les différents graphes peuvent être choisis pour que les régions se recouvrant s'accordent sur leur orientation, sont appelées variétés orientables. En topologie différentielle, une des façons de définir cette notion d'orientabilité et d'orientation est d'introduire la forme volume.
Le bord d'une variété orientée est une variété orientée sans bord. Cette remarque conduit à une formulation du cobordisme pour les variétés orientées sans bord.
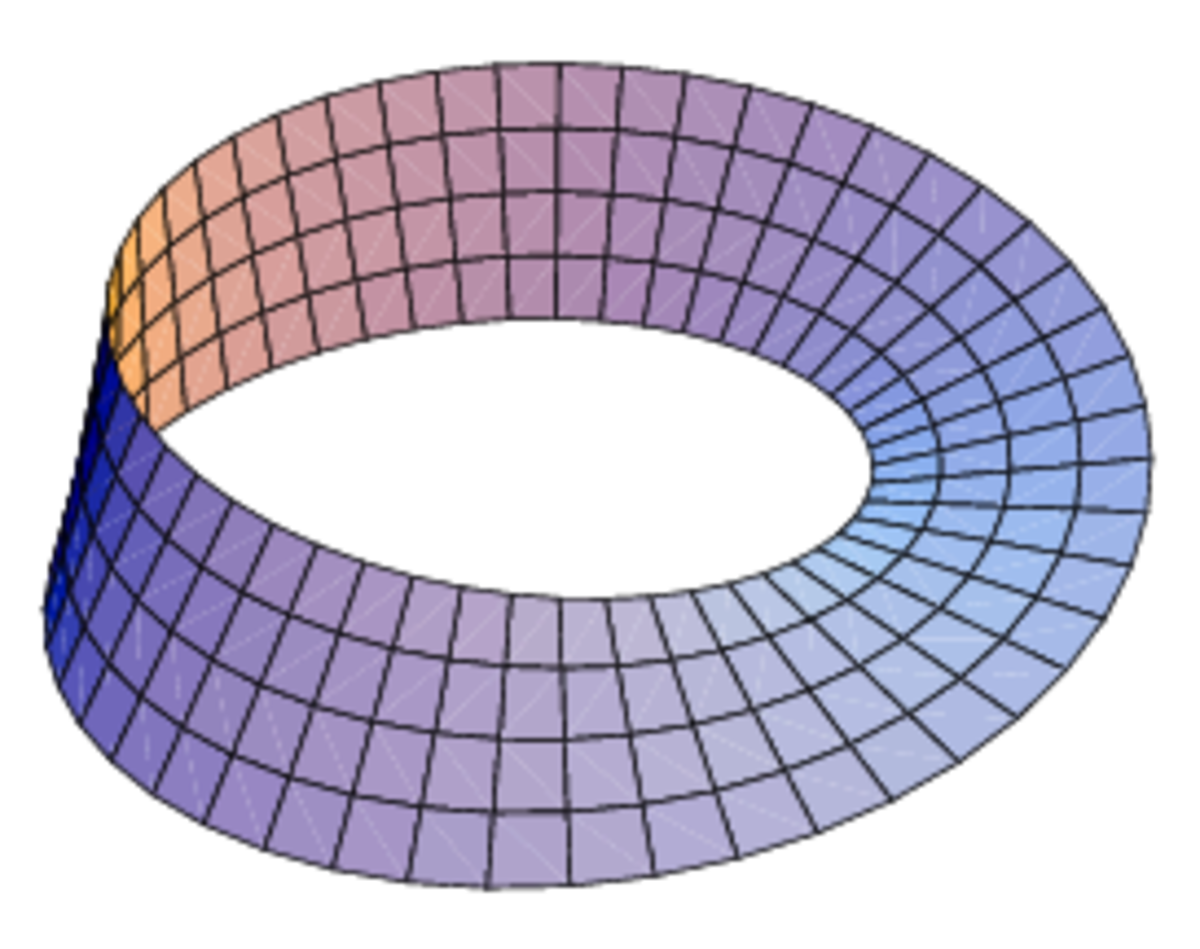
On peut citer quelques exemples de variétés non orientables : (1) l'anneau de Möbius, qui est une variété avec bords, (2) la bouteille de Klein et (3) le plan projectif réel qui apparaît naturellement en géométrie. Des constructions topologiques de ces surfaces sont proposées dans les articles dédiés.
Orientation d'une surface
La définition de l'orientation d'une surface dépend de la manière de regarder cette surface (points de vue intrinsèque ou extrinsèque).
Une orientation d'une surface S est la donnée d'orientations de ses plans tangents TMS, et qui en un sens à préciser sont compatibles. Si ce plan tangent peut se réaliser comme un plan vectoriel de R3, le choix d'une orientation se résume au choix d'une orientation sur l'orthogonal, qui est une droite vectorielle. La définition de l'orientation des surfaces plongées dans R3 est dont particulière.
Une surface S de R3 est dite orientable lorsqu'il existe une application continue n:S

Orienter la surface orientable connexe, c'est choisir une des deux orientations.
Les définitions se généralisent directement pour les hypersurfaces de Rn.
Il faut savoir que toute hypersurface compacte de Rn est orientable : cette propriété est une généralisation du théorème de Jordan en dimension >2.

















































