Statique du point - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
La statique du point est un cas particulier de la statique.
Statique du point
On appelle point matériel un objet idéal de dimensions nulles (assimilable à un point) mais doté d'une masse.
- Un point matériel est immobile ou en mouvement de translation uniforme dans un référentiel galiléen si la somme des forces extérieures qui s'exercent sur lui est nulle (les forces s'opposent et s'annulent) :
-


Ceci dérive de la première loi de Newton.
Par la suite, on représentera des objets volumiques, mais comme on ne s'intéresse ici qu'au mouvement du centre d'inertie G de cet objet (cf. cinématique), tout se passe comme si les forces s'appliquaient sur G, le point matériel est alors G doté de la masse de l'objet.
Exemples de forces
La force est un modèle (sous la forme d'un vecteur) qui sert à représenter les interactions indépendamment de leur cause (poids, traction d'un câble, force électrostatique ou magnétique…). La manière la plus simple de la représenter est de considérer la traction par un câble. En effet, le vecteur force est nécessairement dans la direction du câble et dans le sens de la traction, son point d'application est le point d'attache du câble à l'objet.
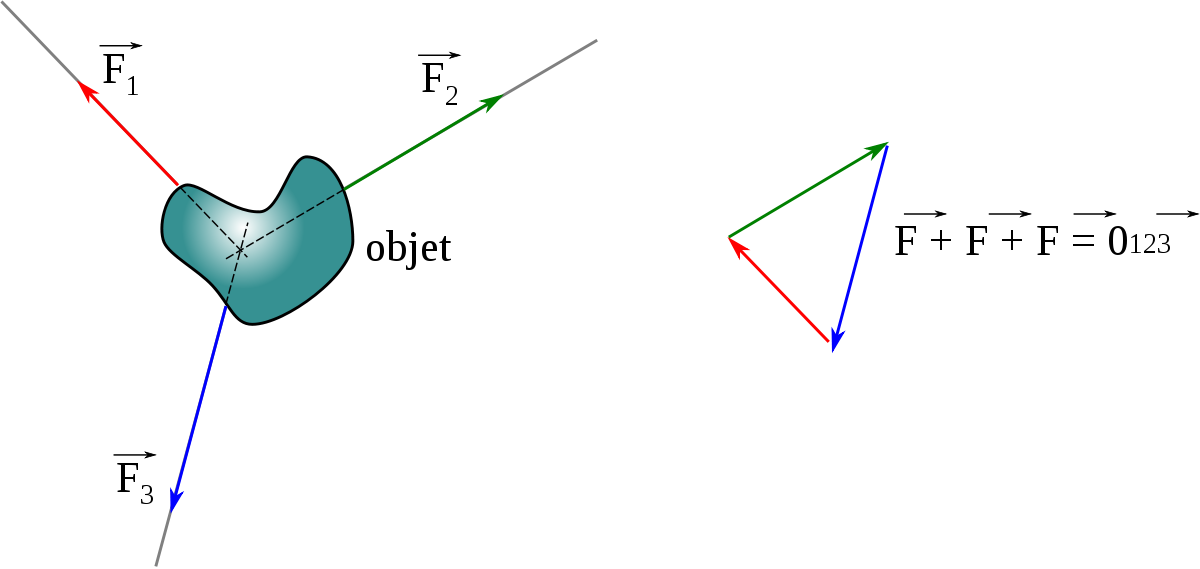
Si par exemple on considère un objet relié à trois câbles et non soumis à son poids (l'expérience se déroule dans la navette spatiale, en état d'impesanteur), la condition d'équilibre est très simple : si




Le poids est une action mécanique qui s'exerce en tout point de l'objet. On peut la résumer en une force unique notée

Dans le modèle de la gravité de Newton, le poids est obtenu en multipliant la masse m de l'objet par l'accélération



Si l'on a un objet immobile suspendu à un fil, alors la somme vectorielle de la traction

-




Si un objet est posé immobile sur un support, une table, il est soutenu par ce support. Le support exerce donc sur l'objet une force qui compense exactement le poids ; cette force est appelée action du support (ou parfois réaction du support) et est notée

Dans ce cas simple, on a
-




Principe de l'action et de la réaction
Lorsqu'un objet A exerce une force (appelée « action ») sur un objet B, l'objet B exerce une force opposée (appelée « réaction ») sur l'objet A. Ce principe est également appelé « troisième loi de Newton ».
Ainsi, dans le cas d'un objet suspendu à un câble, le câble exerce une traction sur l'objet, donc l'objet exerce aussi une traction sur le câble (c'est pour cela qu'il est tendu). Dans le cas d'un objet posé sur un support, le support exerce une force sur l'objet (la réaction du support), donc l'objet exerce lui aussi une force sur le support (la pression de l'objet).

On voit qu'un des éléments fondamentaux est de bien définir le système sur lequel on travaille. On considère les forces qu'exercent les éléments extérieurs au système sur le système lui-même. Ainsi, dans le cas de l'objet suspendu au câble, on peut choisir comme système :
- l'objet, soumis à son poids


- ou bien le câble, soumis à la traction


- mais encore l'ensemble (câble+objet) soumis au poids


D'après le principe de l'action et de la réaction, on en déduit que

les conditions d'équilibre s'écrivent
-

-



soit au final

on voit donc que le câble transmet intégralement les efforts, pour le plafond, tout est comme si le solide était attaché sans intermédiaire.
Réaction du support et adhérence
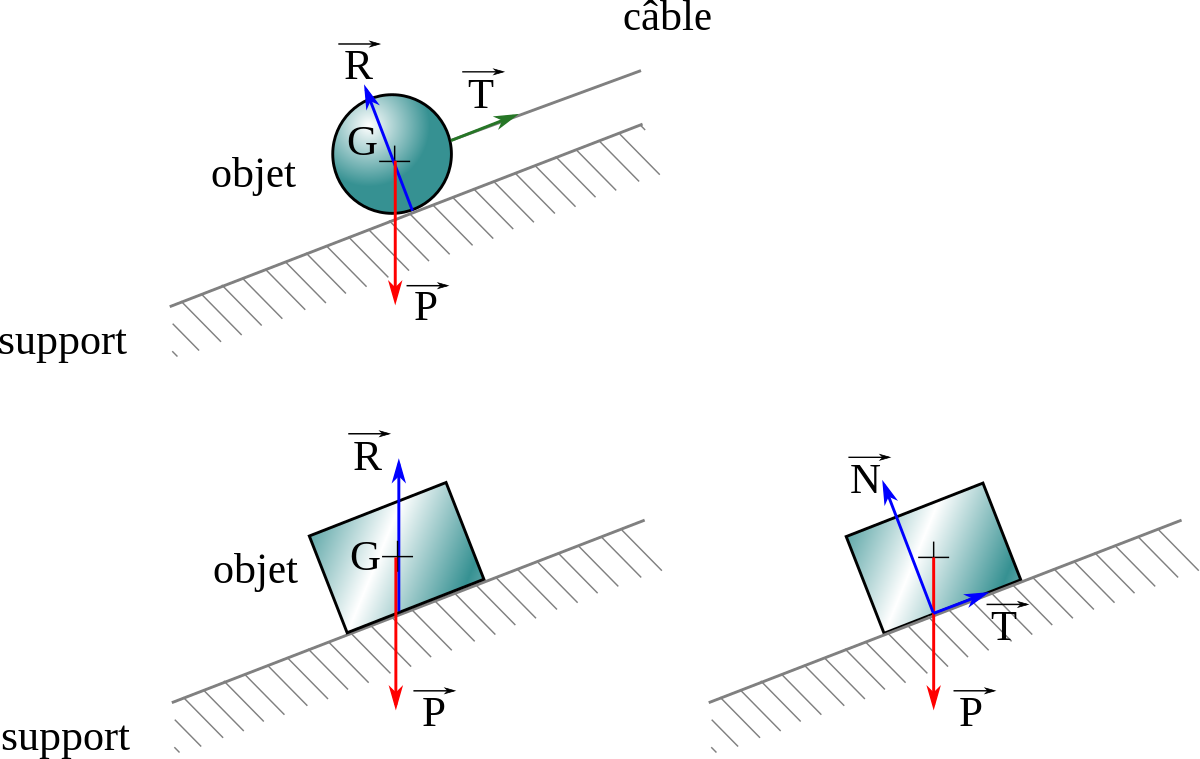
Dans de nombreux problèmes simples, la réaction du support est perpendiculaire à la surface de celui-ci. Ceci n'est en fait vrai que pour un objet immobile sur une surface sans frottement. Ainsi, par exemple, supposons un objet posé sur un plan incliné parfaitement glissant (ou bien une boule pouvant rouler sans frottement) et retenu par un câble, alors la réaction du support est bien perpendiculaire à celui-ci.
Mais le cas est différent dans le cas d'un objet immobile sur un plan incliné, sans câble, retenu uniquement par frottement ; la réaction

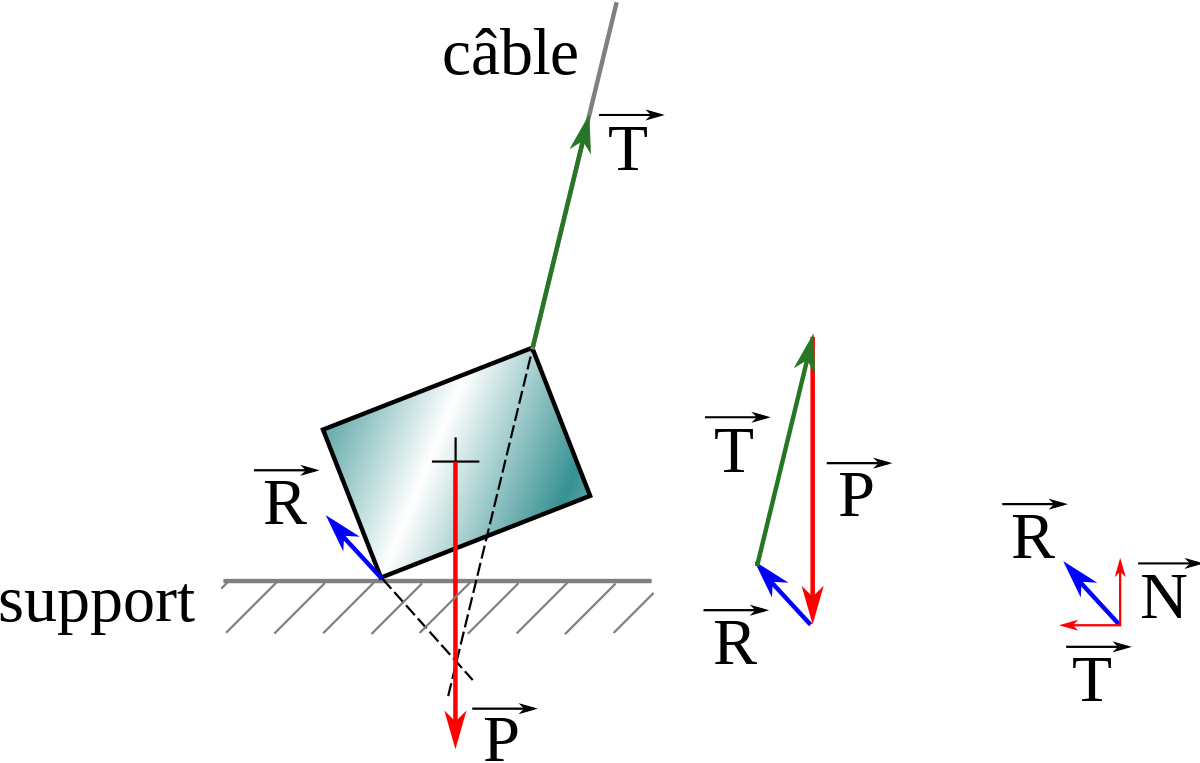
Nous présentons ci-contre un autre cas où la réaction n'est pas perpendiculaire au support.
L'intensité de la force de frottement est déterminée par le loi de Coulomb.
Levier, moment d'une force
Un levier est une barre rigide pivotant autour d'un point fixe. Le pivot peut être situé à une extrémité, au milieu, ou bien à n'importe quel endroit du levier. Le levier permet de démultiplier la force, par exemple pour soulever un objet lourd avec une force réduite.
Il ne s'agit plus vraiment de mécanique du point puisque l'on étudie la rotation d'un objet, le levier, que l'on ne peut réduire à un point (d'ailleurs, la rotation d'un point n'a pas de sens). C'est l'équilibre de l'objet placé au bout du levier qui nous intéresse, mais ceci nécessite de s'intéresser au levier en lui-même.
Supposons le cas où l'on veut lever un objet. Le levier est soumis à trois forces :
- l'action

- l'action

- l'action
À l'équilibre, la somme des trois forces s'annulent,

mais cela ne suffit pas à étudier le problème : on ne sait pas quelle est la répartition des forces entre l'action du pivot et l'action de la personne. On introduit pour cela la notion de moment par rapport au pivot.
Le moment d'une force



où d est la distance du pivot à la droite portant le vecteur force ; le moment est positif si la force tend à créer une rotation dans le sens positif (sens inverse des aiguilles d'une montre.). La longueur d est appelée bras de levier.
Plus simplement, on peut considérer le moment d'une force par rapport à un point comme son aptitude à faire tourner autour du point considéré le corps sur lequel elle s'exerce. Cette aptitude augmente avec l'intensité de la force (si je pousse plus fort…), et avec la distance observée (si je pousse plus loin…).
On peut à l'aide de cette notion énoncer la loi de l'équilibre en rotation (statique du solide) :
- Un objet levier est en équilibre de rotation par rapport à un pivot si la somme des moments des forces par rapport à ce pivot est nulle.
On a donc maintenant une deuxième équation qui va permettre de déterminer

On peut déjà dire que


Si d1 est le bras de levier de
- F1 · d1 = F2 · d2
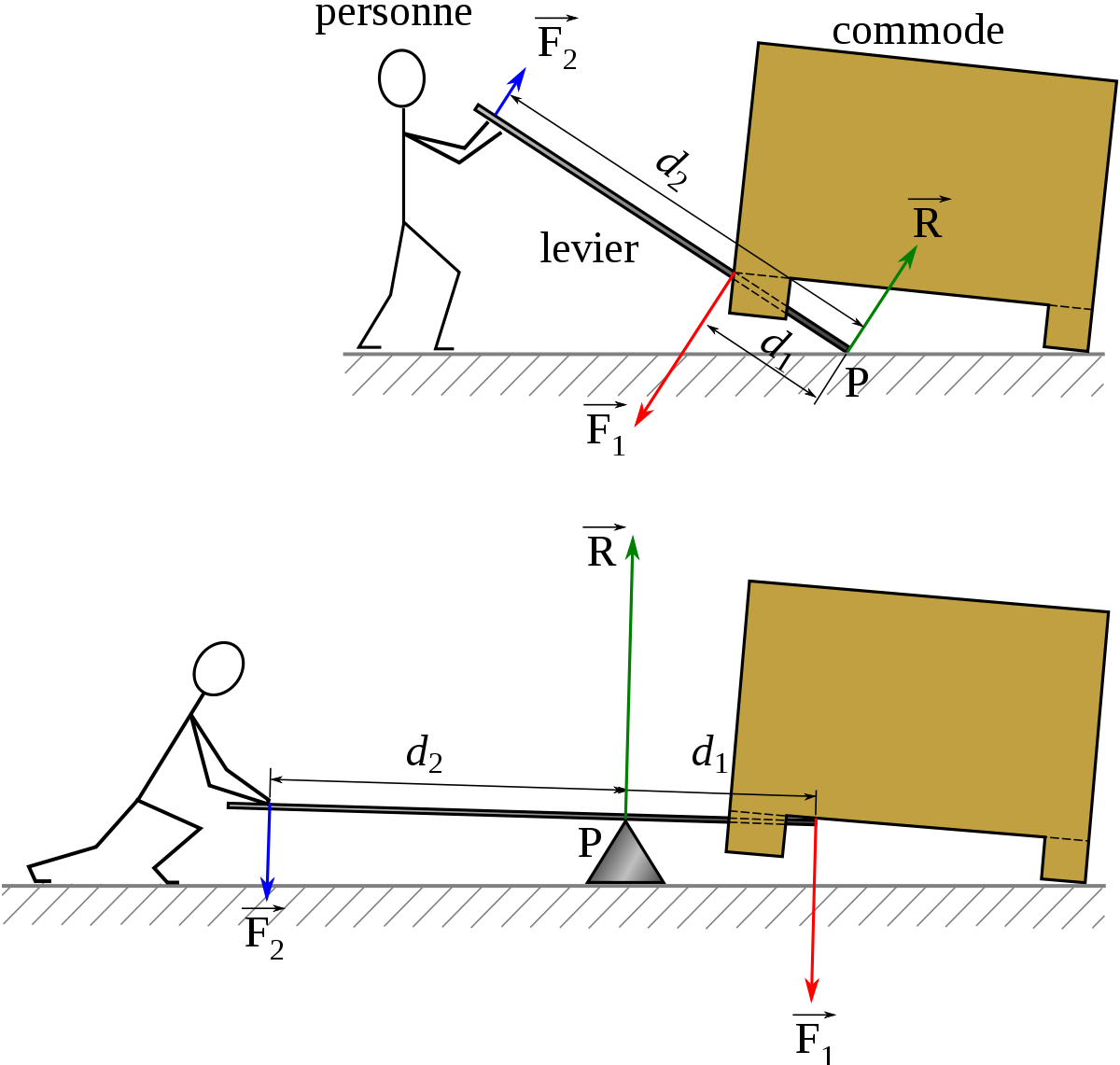
donc si d2 > d1, alors F1 > F2. On voit donc que si le bras de levier est plus long du côté de la personne que du côté de l'objet, la personne devra faire un effort réduit pour maintenir l'équilibre (c'est-à-dire concrètement pour soulever l'objet) : la force exercée par le pivot sur le levier participe à soulever l'objet. Dans le cas contraire, l'objet sera plus difficile à soulever qu'à la main directement. L'image ci-contre montre deux manières de soulever une commode en s'aidant d'un levier : en prenant appui sur le sol (figure du haut, le pivot est à l'extrémité du levier) ou bien sur un objet intermédiaire (figure du bas, le pivot est situé sur le levier).
Les balances à masse coulissante (balances romaines) utilisent ce principe pour peser.
Il faut que les moments soient tous calculés par rapport au même pivot. Par exemple, si l'on a deux leviers agissant l'un sur l'autre mais pivotant chacun sur un point différent, on ne peut pas écrire l'égalité des moments au point de contact.
Poulie
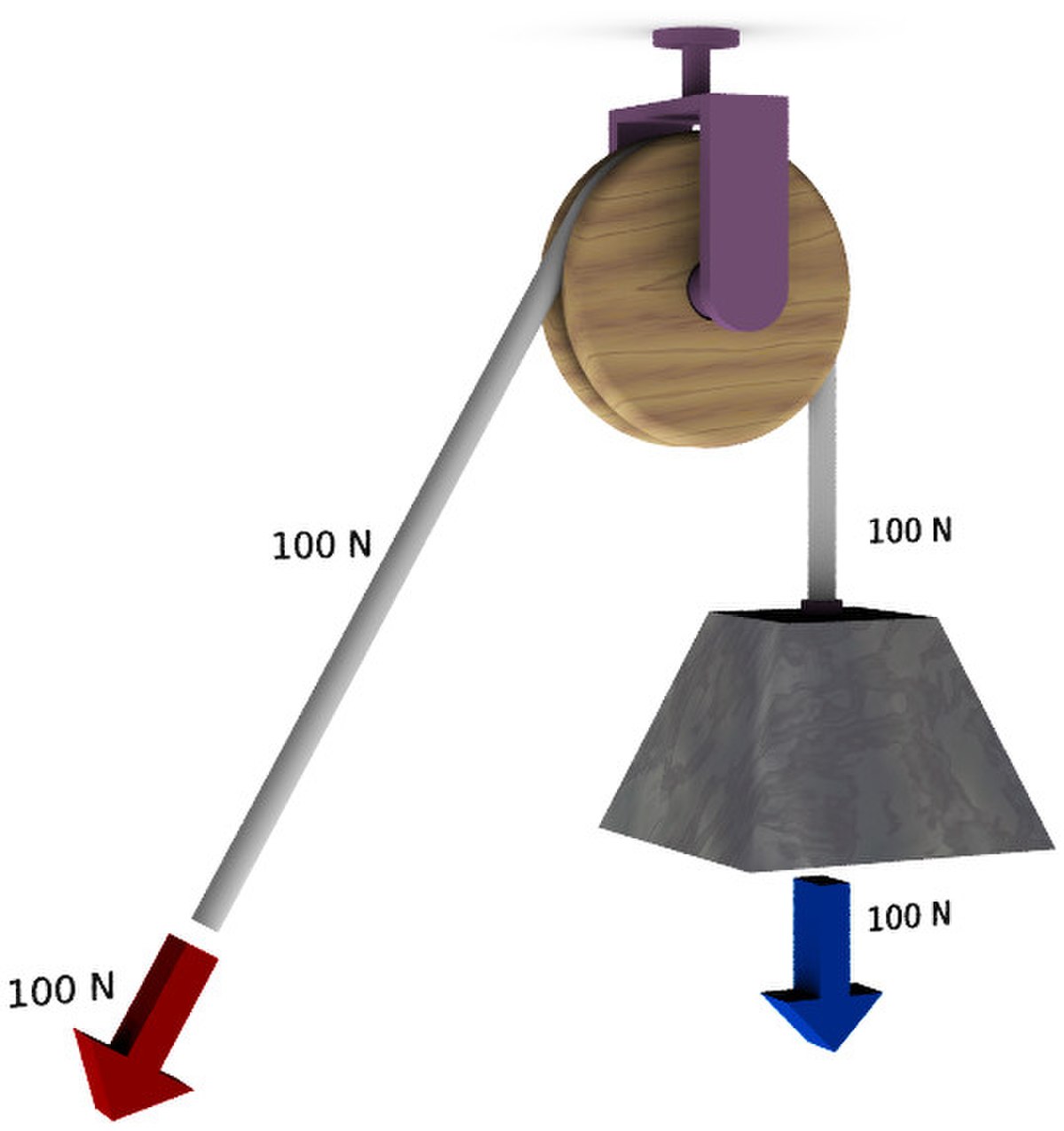
On peut faire changer cette force de direction à l'aide d'une poulie. La poulie est en soi un objet qui est soumis à des forces ; si elle est à l'équilibre (elle ne bouge pas, ne tourne pas), alors la somme des forces est nécessairement nulle, et la somme de leurs moments est elle aussi nulle.
Dans le cas d'une poulie de renvoi (la poulie est fixée à un objet fixe dans le référentiel, comme un mur ou un plafond), le câble passe dans la gorge de la poulie ; l'équilibre des moments implique que la force qui s'exerce sur chaque brin du câble est la même. La poulie change donc la direction de la force dans le câble (via la réaction du support de la poulie), mais pas son intensité.
Dans le cas d'une poulie renversée, mobile, le câble est fixé à un objet immobile dans le référentiel (par exemple plafond). L'action du support sur le câble s'ajoute à l'action de l'opérateur sur le câble, le poids de la poulie et de sa charge est donc pris en charge en partie par le support. C'est aussi le principe du cabestan. En fait la charge est équitablement répartie sur l'ensemble des fils soutenant la poulie.
Dans le cas d'une poulie à double gorge, on a deux câbles qui passent chacun par une gorge ayant un diamètre différent. On se retrouve dans la même configuration que le levier.

















































