Connexité (mathématiques) - Définition
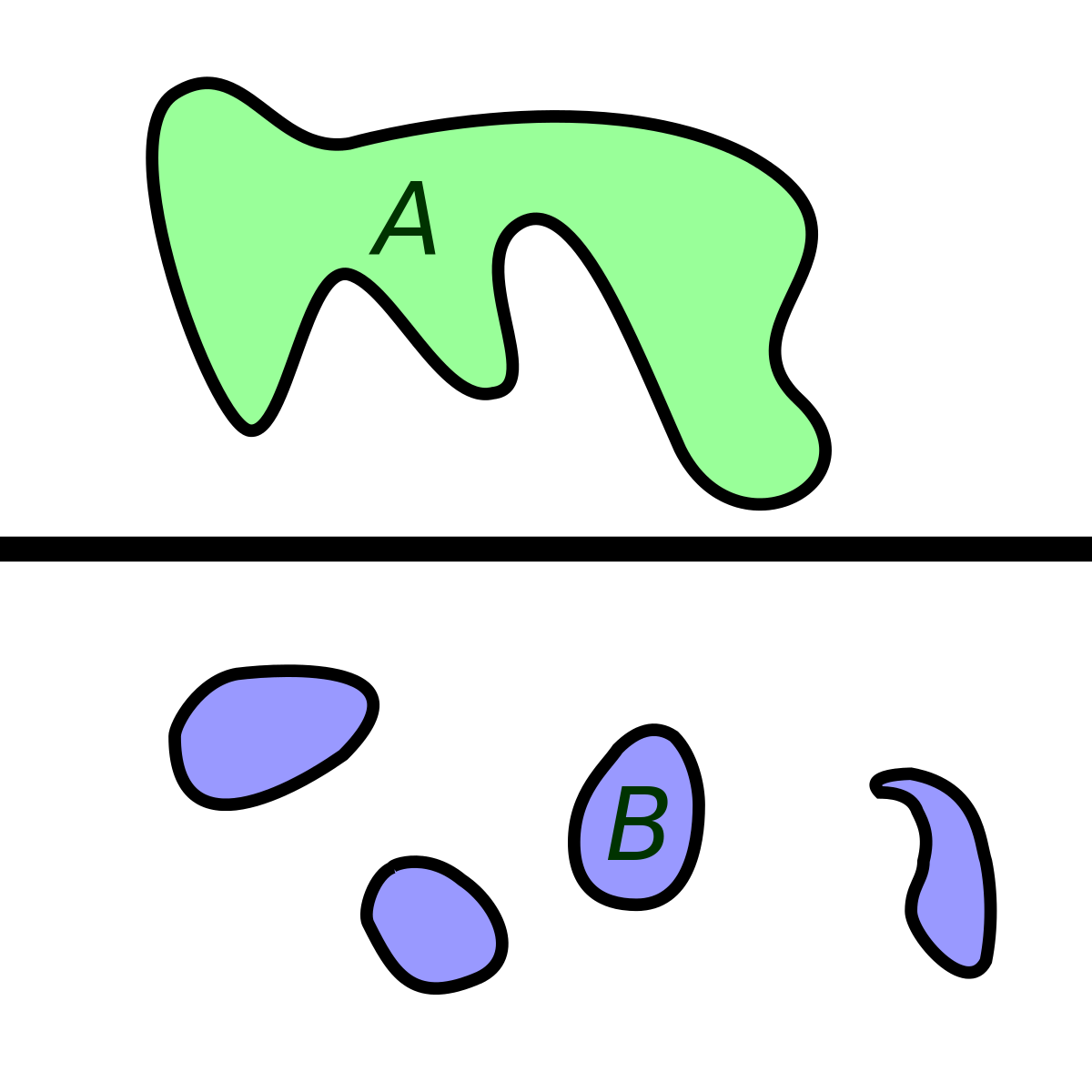
En mathématiques, la notion topologique de connexité formalise le concept d'"être d'un seul tenant ".
Définition
Soit un espace topologique

-

-
- Toute application continue


Cette dernière caractérisation est souvent celle qui est la plus commode à utiliser pour démontrer un résultat de connexité.
Dans le cas où ces conditions sont remplies on dit que l'espace
Une partie

Par exemple un singleton

Connexité et nombres réels
- L'ensemble des nombres réels

On montre d'abord que tout intervalle fermé borné
![[a,b]\,](https://static.techno-science.net/illustrationWebp/Definitions/autres/7/7f3408c72246eece3d5542fc853ce417_5346f07f8b2ea4b5c51d8a4778972123.png)






![w=\frac{u+v}{2}\in [a,b]\,](https://static.techno-science.net/illustrationWebp/Definitions/autres/a/a2d52fa81df971ea87c28f86c13e26a0_fb81692c79a0d0b8699561e49567fdc1.png)



Comme
![\R =\cup_{n\ge 1}[-n,n]\,\!](https://static.techno-science.net/illustrationWebp/Definitions/autres/b/bffd68449b3808b3567e843b8e3b3309_3ffb1a2d3231d622640665798a36e973.png)

- Les parties connexes de



![]-\infty,a[\!](https://static.techno-science.net/illustration/Definitions/autres/a/abaf08b594fbb5acd807f8b2ddf96dd8_3b8913bb181c407d9672f4cc3051c5a0.png)
![]a,+\infty[\!](https://static.techno-science.net/illustration/Definitions/autres/e/ed8178642e0f8ac75bc2dcd8448b1c5d_a49ad7e6fcd9fae417a8cccd6b75d81f.png)



![]-\infty,a[\!](https://static.techno-science.net/illustrationWebp/Definitions/autres/a/abaf08b594fbb5acd807f8b2ddf96dd8_3b8913bb181c407d9672f4cc3051c5a0.png)
![]a,+\infty[\!](https://static.techno-science.net/illustrationWebp/Definitions/autres/e/ed8178642e0f8ac75bc2dcd8448b1c5d_a49ad7e6fcd9fae417a8cccd6b75d81f.png)
Par exemple
![[0,1] \cup [2,3] \,\!](https://static.techno-science.net/illustrationWebp/Definitions/autres/7/73726976a58199c9ac0b0abb04ccb780_6a00707b6d3642f49f7158badf5d1658.png)
Propriétés
Union, intersection, adhérence
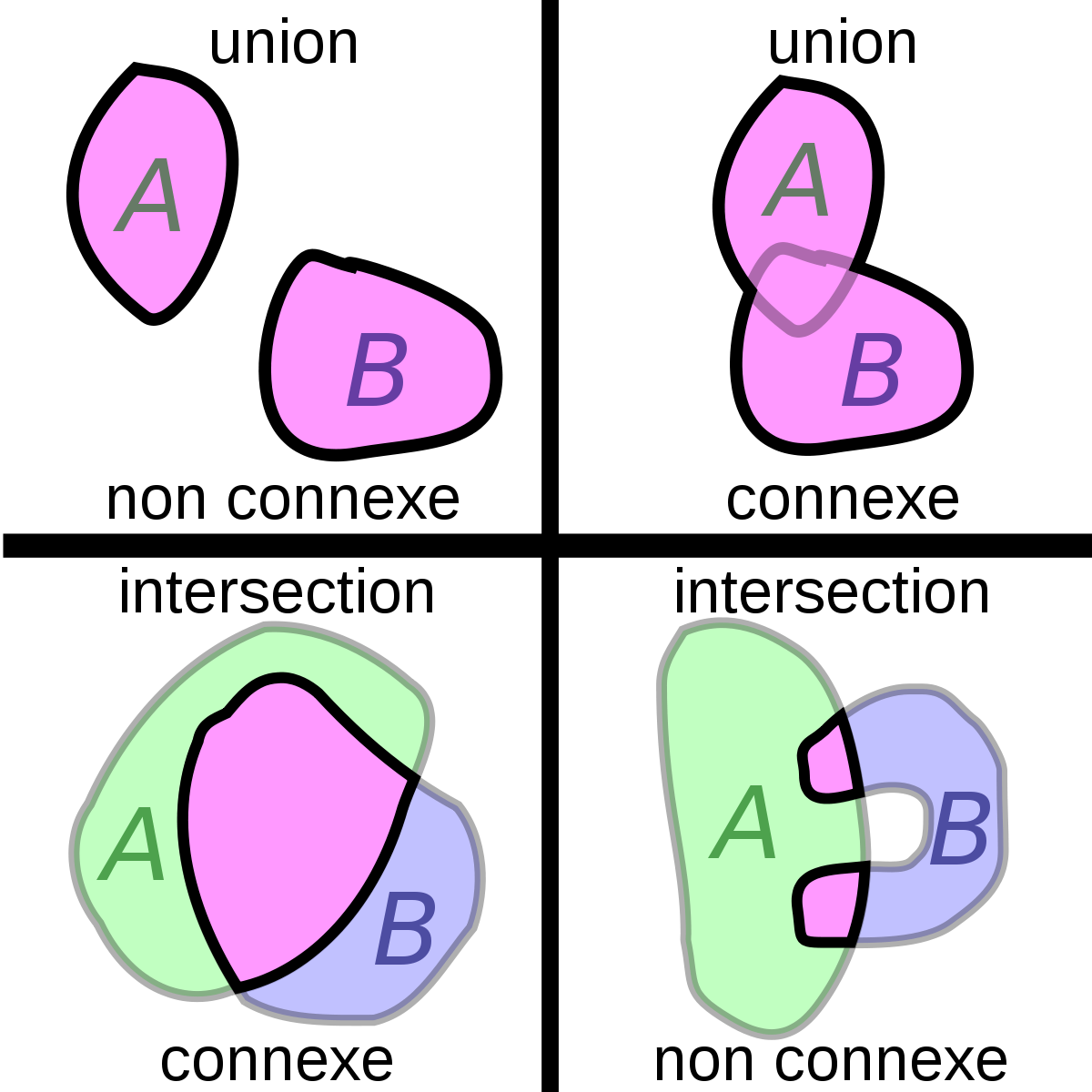
Si

En revanche, l'union des deux parties connexes est connexe si elles ont un point commun. Plus généralement, si



Autre généralisation : la réunion d'une famille quelconque

Si





Composantes connexes
Étant donné un point



Au minimum, on a

Au maximum, on a

On définit une relation d'équivalence sur



Les classes d'équivalence pour cette relation sont appelées composantes connexes de
Exemples :
-



- Dans

- Dans






Un espace topologique dont les composantes connexes sont les singletons est dit totalement discontinu.
Connexité et continuité
On sait caractériser les espaces connexes par le fait que toute fonction continue à valeurs dans

En fait, on peut dire plus généralement que l'image d'un espace connexe par une application continue est toujours connexe. Plus précisément si



Dans le cas ou






Deux applications fondamentales à l'Analyse
Pour montrer qu'une propriété est vraie pour tous les points d'une partie que l'on sait connexe, on montre que l'ensemble des points qui la satisfait est ouvert et fermé. C'est ce qu'on fait pour le théorème d'unicité global des solutions d'une équation différentielle, et pour le principe du prolongement analytique
Applications à la topologie
La droite


Le même argument montre que le cercle S1 n'est pas homéomorphe à un intervalle.
Cet argument ne s'étend pas aux dimensions supérieures. Si on veut montrer en utilisant les mêmes idées que


















































