Théorème de Morley - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
En mathématiques, et plus précisément en géométrie plane, le théorème de Morley, découvert par Frank Morley en 1898, affirme que :
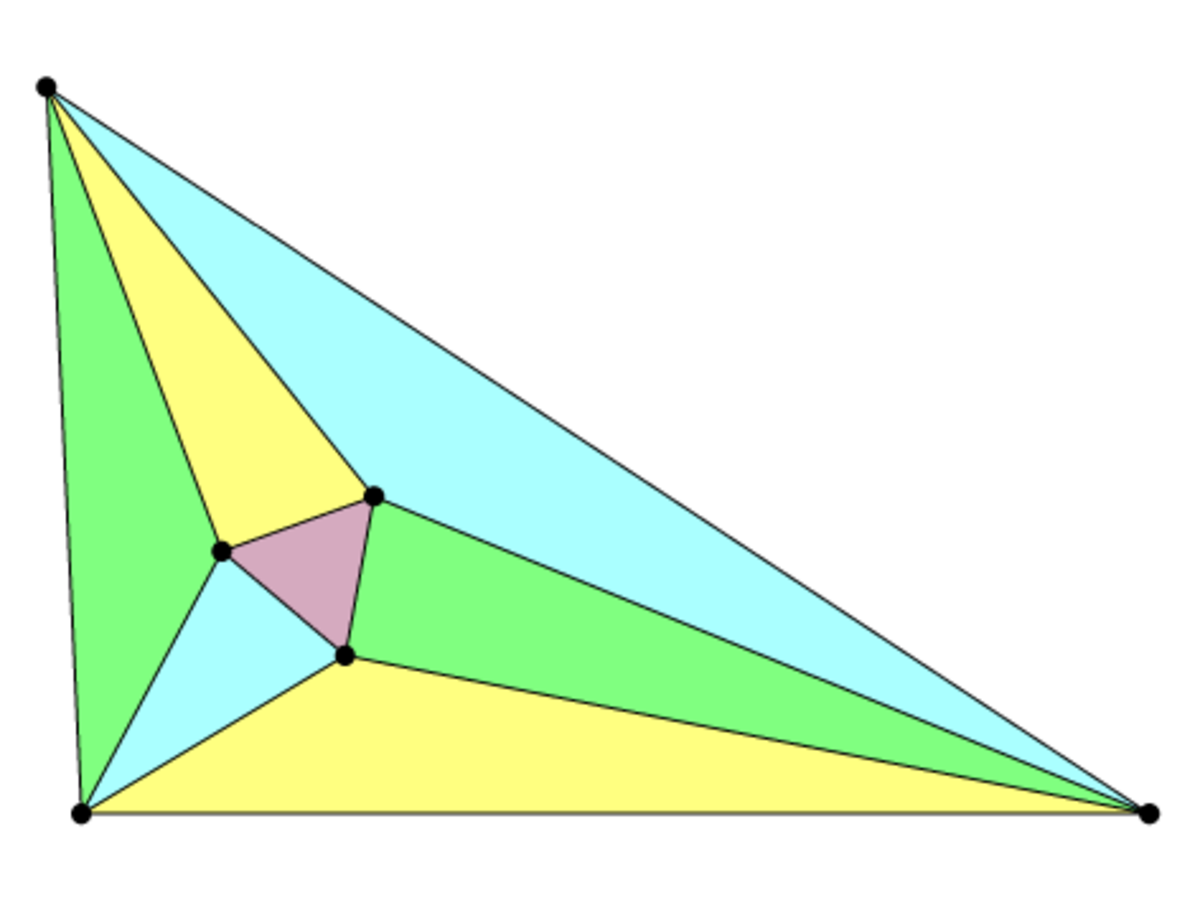
« Les intersections des trissectrices des angles d'un triangle forment un triangle équilatéral »
Le triangle équilatéral ainsi défini par le théorème de Morley s'appelle le « triangle de Morley » du triangle de départ.
Démonstrations
Première démonstration
Cette méthode simple utilise les lois trigonométriques.
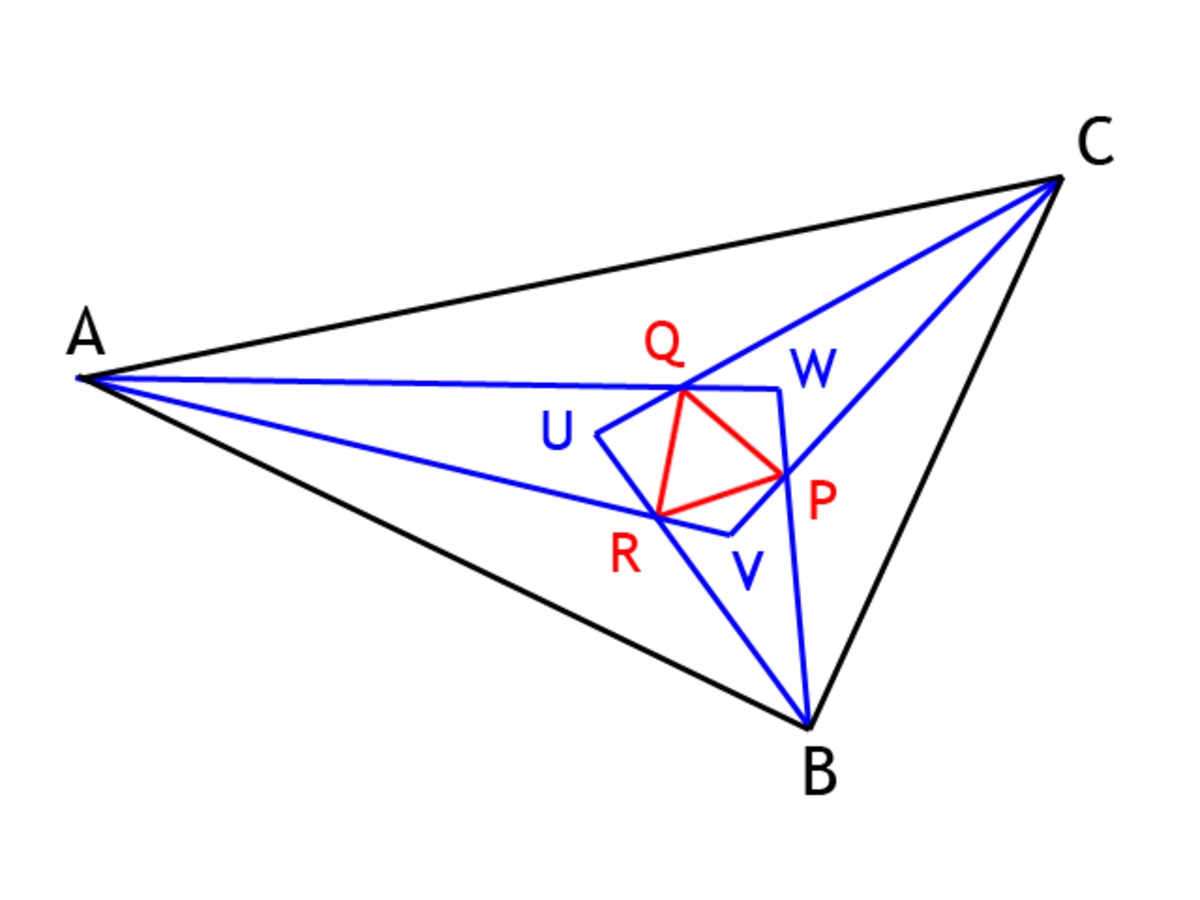
On peut en effet déterminer, d'après la loi des sinus, la longueur de la plupart des segments à partir des côtés du triangle. Par ailleurs, le théorème d'Al-Kashi nous permet de déterminer et de comparer les autres, notamment QR, PR, et PQ - les trois côtés du triangle rouge, celui qui est censé être équilatéral.
On définit les angles a, b et c tels que :



Puisque dans tout triangle on a :

notre changement de variable ci-dessus donne :
-


De plus, pour simplifier les calculs on adopte une unité telle que le rayon du cercle circonscrit au triangle est 1. On a alors :
- AB = 2 sin(3c)
- BC = 2 sin(3a)
- AC = 2 sin(3b).
Dans le triangle BPC, d'après la loi des sinus, on a :


On peut développer sin(3a) :
- sin(3a) = 3sin(a) - 4sin3(a)
- 3sin(a) - 4sin3(a) = 4sin(a)[(√3/2)² - sin²(a)]
- 4sin(a)[(3/2)² - sin²(a)] = 4sin(a)[sin²(60°) - sin²(a)]
- 4sin(a)[sin²(60°) - sin²(a)] = 4sin(a)[sin(60°) + sin(a)][sin(60°) - sin(a)]
- 4sin(a)[sin(60°) + sin(a)][sin(60°) - sin(a)] = 4sin(a) 2sin[(60°) + a)/2]cos[(60°) - a)/2] × 2sin[(60°) - a)/2]cos[(60°) + a)/2]
- sin(a) 2sin[(60°) + a)/2]cos[(60°) - a)/2] × 2sin[(60°) - a)/2]cos[(60°) + a)/2] = 4sin(a)sin(60° + a)sin(60° - a)
Ce qui nous permet de simplifier l'expression de BP :
Mais que l'on peut appliquer également à BR :

Al-Kashi nous donne : PR² = BP² + BR² - 2BPBR cos(b). Si on développe, on obtient :
![PR^2 = 64 \sin^2 (a) \sin^2 (c)[ \sin^2(60^\circ + a) + \sin^2 (60^\circ + c) - 2 \sin(60^\circ + a) \sin (60^\circ + c) \cos(b)]](https://static.techno-science.net/illustrationWebp/Definitions/autres/9/9fb1fcbfdac1531791ec5425d247d8a8_35d5a0e670f2d00352d7c83a3a2c0c07.png)
Or, (60° + a) + (60° + c) + b = 120° + (a + b + c) = 120° + 60° = 180 °. Parmi les triangles ayant pour angle 60° + a, 60° + c et b dont le rayon du cercle circonscrit est 1, si on applique Al-Kashi, on a :
- sin²(b) = sin²(60° + a) + sin²(60° + c) - 2 sin(60° + a) sin(60° + c) cos(b)
- PR = 8 sin(a) sin(b) sin(c)
- PQ = 8 sin(b) sin(a) sin(c)
- QR = 8 sin(a) sin(c) sin(b)
- PR = PQ = QR
Le triangle PQR est donc bien équilatéral.
Deuxième démonstration
Cette démonstration est basée sur un article d'Alain Connes. Elle utilise les nombres complexes et donne un calcul rapide de l'affixe des sommets du triangle équilatéral.
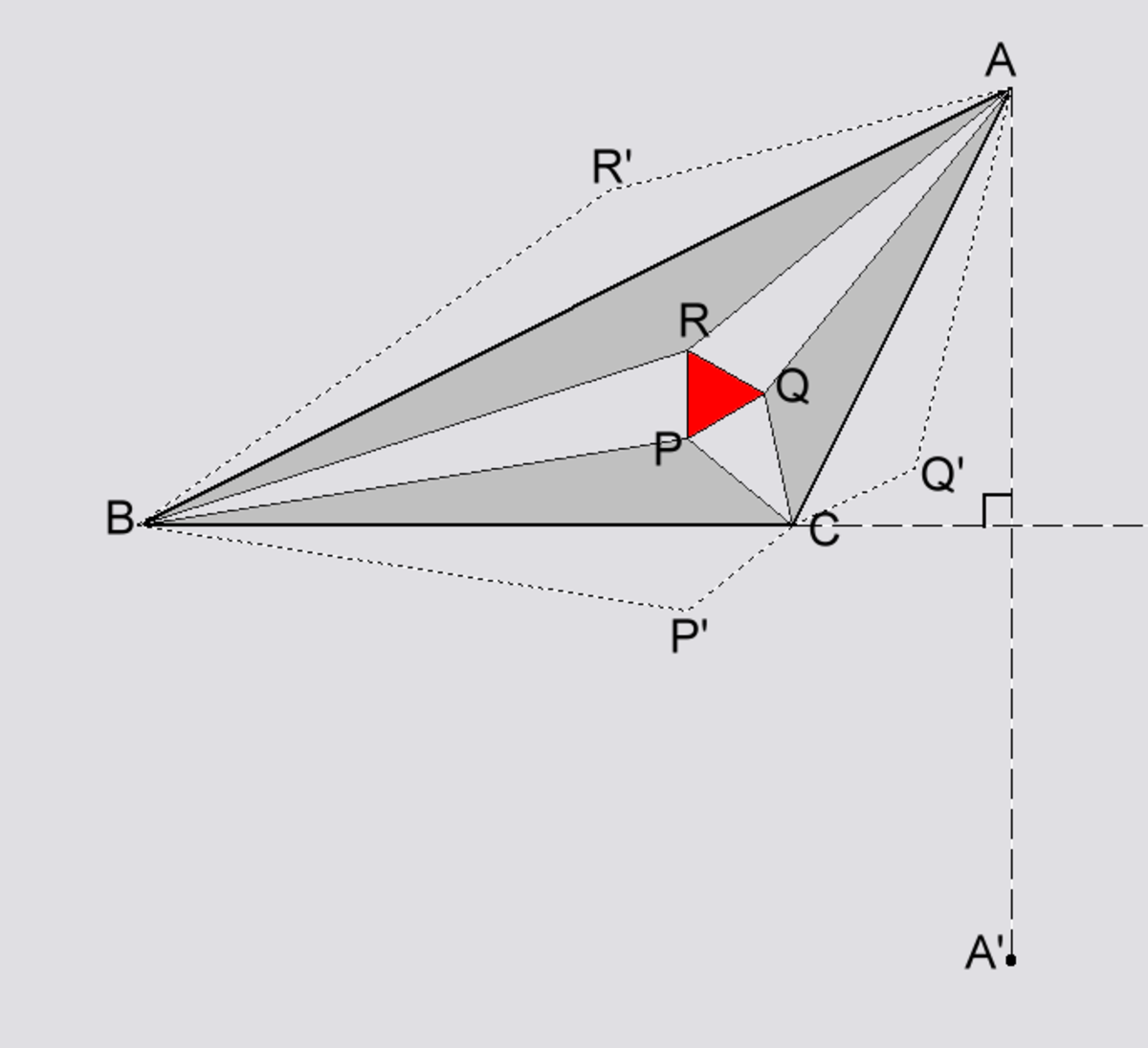
Plaçons-nous dans le plan euclidien orienté que nous pourrons ultérieurement identifier au corps des complexes. Désignons par P, Q et R les 3 intersections de trisectrices dont on veut montrer qu'elles forment un triangle équilatéral. En outre plaçons les points P', Q' et R' symétriques de P, Q et R respectivement par rapport à BC, CA, AB (voir figure ci-contre). Désignons enfin respectivement par




Soient maintenant


- (i) P (resp. Q, R) est le point fixe de

En effet h transforme P en P' et g transforme P' en P (immédiat: voir figure). Il en est de manière analogue pour Q et R. - (ii)

En effet la somme des angles des rotations composantes est 2π et on obtient donc une translation. Mais A est invariant puisque h3 (rotation de centre C et d'angle 2γ ) transforme A en A' symétrique de A par rapport à BC, g3 transforme A' en A et finalement f3 laisse A invariant. Par suite cette translation est l'application identique.


Il est tout à fait remarquable que les seules propositions (i) et (ii) ci-dessus sont suffisantes pour en déduire le caractère équilatéral du triangle PQR. Il n'est même pas besoin de supposer que





Ainsi, nous allons désormais travailler dans le corps des complexes en conservant les notations que nous avons introduites.
Nous définissons simplement

-

-

-




Un calcul rapide montre que (i) équivaut à



Quant à (ii) on montre aisément l'équivalence avec


Comme



Maintenant, après 2 lignes de calcul, on obtient :
![\quad P+jQ+j^2R=[(1-a_2a_3)a_3(j^2-a_1)b_1+(1-a_3a_1)a_1(1-a_2j)b_2+(1-a_1a_2)a_2(j-a_3j^2)b_3]/[(1-a_1a_2)(1-a_2a_3)(1-a_3a_1)]](https://static.techno-science.net/illustrationWebp/Definitions/autres/7/7d0a68248c770f1c1f2e98c8675c4187_f821df77f660d92f02cba0ae70d8a860.png)
![\quad =[a_3/a_1(a_1^2+a_1+1)+a_1/a_2j(a_2^2+a_2+1)+a_2/a_2j^2(a_3^2+a_3+1)]/[(1-a_1a_2)(1-a_2a_3)(1-a_3a_1)]](https://static.techno-science.net/illustrationWebp/Definitions/autres/5/58940a581d29853ac03557ddd690429b_fc6b42f3af9dd23595ac2d5269e752bd.png)
![\quad =-a_3/a_1[(a_1^2+a_1+1)b_1+a_1^3(a_2^2+a_2+1)b_2+a_1^3a_2^3(a_3^2+a_3+1)b_3]/[(1-a_1a_2)(1-a_2a_3)(1-a_3a_1)]](https://static.techno-science.net/illustrationWebp/Definitions/autres/3/39f36084c4c704f141ea17131df95411_ab36a093f20cd39720f16c2f9f960306.png)
Sachant que



on montre que

On a









Puis on multiplie par le dénominateur et par


![j^2a_1^2a_2[(1-a_2a_3)b_1a_3(j^2-a_1)+(1-a_3a_1)b_2a_1(1-ja_2)+(1-a_1a_2)b_3a_2(j-j^2a_3)]](https://static.techno-science.net/illustrationWebp/Definitions/autres/8/8079dadc05b0f3420305a39cb7553cba_0efffd1534fd9286150c90ba671ca54e.png)




Puisque



Et donc

Naturellement si le triangle ABC est de sens négatif, on devra prendre

Dans le cas où ABC est de sens positif, on a en fait

et donc