Rotationnel - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
L'opérateur rotationnel est un opérateur différentiel aux dérivées partielles qui, à un champ vectoriel tridimensionnel A ou

-


selon les conventions de notations utilisées pour les vecteurs.
Plus difficile à se représenter aussi précisément que le gradient et la divergence, il exprime la tendance qu'ont les lignes de champ d'un champ vectoriel à tourner autour d'un point : sa circulation locale sur un petit lacet entourant ce point est non nulle quand son rotationnel ne l'est pas. Par exemple :
- dans une tornade, le vent tourne autour de l'œil du cyclone et le champ vectoriel vitesse du vent a un rotationnel non nul autour de l'œil. Le rotationnel de ce champ de vitesse (autrement dit le champ de vorticité ou encore champ tourbillon) est d'autant plus intense que l'on est proche de l'œil.
- le rotationnel du champ des vitesses v(r') d'un solide qui tourne à la vitesse angulaire Ω est dirigé selon l'axe de rotation et orienté de telle sorte que la rotation ait lieu, par rapport à lui, dans le sens direct et vaut simplement 2 Ω.
La notion de rotationnel de la vitesse est essentielle en mécanique des fluides. Elle décrit une rotation de la particule fluide. Si l'écoulement est irrotationnel (son rotationnel est nul en tout point), en termes mathématiques, le vecteur vitesse est alors le gradient du potentiel (on dit alors que les vitesses « dérivent d'un potentiel »). Si le fluide peut être considéré comme incompressible, la divergence de ce vecteur s'annule. Le laplacien du potentiel est donc nul : il s'agit d'un potentiel harmonique qui satisfait l'équation de Laplace.
Définition
Le rotationnel est un opérateur qui transforme un champ de vecteurs en un autre champ de vecteurs.
Dans un espace à 3 dimensions et en coordonnées cartésiennes (donc en base orthonormée), on peut définir le rotationnel d'un champ F (F, F, F) par la relation
-
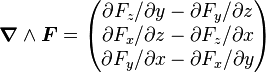

où



Cela peut aussi s'écrire, par abus de notation, à l'aide d'un déterminant :

où i, j, k correspondent aux vecteurs de la base orthonormée considérée. Cette dernière expression est en apparence un peu plus compliquée que la précédente, mais elle se généralise facilement à d'autres systèmes de coordonnées (voir plus bas).
La définition ne dépend pas de la base dans laquelle on écrit F. Pour expliciter cette indépendance on peut préférer une définition qui ne fait pas référence aux coordonnées de F. Ainsi, une définition intrinsèque (parmi d'autres) du rotationnel est la suivante. À partir d'un vecteur constant X et du champ F, on peut construire le champ

-


Une autre définition possible, plus générale mais plus difficile à formaliser, consiste à définir le rotationnel d'un champ de vecteurs en un point comme la circulation locale du champ autour de ce point.
À l'instar de ce qu'il se passe pour le produit vectoriel de deux vecteurs, le rotationnel d'un champ de vecteurs vrai en un point est un pseudovecteur.
Tenseur rotationnel
En réalité, le rotationnel ne peut se décrire rigoureusement que dans le cadre du formalisme des tenseurs. Dans ce contexte, le rotationnel est appliqué sur une forme linéaire f pour former un tenseur d'ordre 2. Ses composantes s'écrivent
-
![[{\rm rot} \;f]_{ab} = \partial_a f_b - \partial_b f_a](https://static.techno-science.net/illustration/Definitions/autres/9/98d31478782f459864d1cb34612384eb_ee2519c6480099c549f07c27f2f9e62e.png)
![[{\rm rot} \;f]_{ab} = \partial_a f_b - \partial_b f_a](https://static.techno-science.net/illustrationWebp/Definitions/autres/9/98d31478782f459864d1cb34612384eb_ee2519c6480099c549f07c27f2f9e62e.png)
Cette expression ne fait intervenir que des dérivées ordinaires et non des dérivées covariantes. La différence qui intervient est la même que l'on considère des dérivées ordinaires ou des dérivées covariantes. Cette expression peut être par construction vue comme une matrice antisymétrique. En dimension 3, il existe une correspondance avec les vecteurs (possédant trois composantes) et les matrices antisymétriques (possédant trois composantes indépendantes). On peut donc assimiler cette matrice à un vecteur. Techniquement, la correspondance est faite à l'aide du tenseur de Levi-Civita ε, qui permet de construire le vecteur dual d'un tenseur antisymétrique d'ordre 2. Le rotationnel d'un champ de vecteurs a tridimensionnel est défini comme le dual du tenseur rotationnel :
-
![[{\rm rot} \;f]^c = \frac{1}{2}\varepsilon^{cab} \left(\partial_a f_b - \partial_b f_a \right)](https://static.techno-science.net/illustration/Definitions/autres/5/58c42810a705ee1ca7445da281e0797e_6099cfcfd7e9c8550c24cbb0fd9f9c0b.png)
![[{\rm rot} \;f]^c = \frac{1}{2}\varepsilon^{cab} \left(\partial_a f_b - \partial_b f_a \right)](https://static.techno-science.net/illustrationWebp/Definitions/autres/5/58c42810a705ee1ca7445da281e0797e_6099cfcfd7e9c8550c24cbb0fd9f9c0b.png)
À partir du moment où est définie une métrique g, on peut sans difficulté construire le rotationnel d'un vecteur, en utilisant la métrique pour transformer le vecteur en sa forme linéaire associée puis en utilisant la formule ci-dessus. Ainsi, pour un vecteur a de composantes ab, on a
-
![[{\rm rot} \;a]^c = \frac{1}{2}\varepsilon^{cab} \left(\partial_a (g_{bd} a^d) - \partial_b (g_{ad} a^d) \right) = \frac{1}{2}\varepsilon^{cab} \left(\partial_a a_b - \partial_b a_a \right) = \varepsilon^{cab} \partial_a a_b](https://static.techno-science.net/illustration/Definitions/autres/d/d11ae932cbdb2a2a401f8c3abbe9ac0b_c3df2eb2073cdc12f25b5080e57711ae.png)
![[{\rm rot} \;a]^c = \frac{1}{2}\varepsilon^{cab} \left(\partial_a (g_{bd} a^d) - \partial_b (g_{ad} a^d) \right) = \frac{1}{2}\varepsilon^{cab} \left(\partial_a a_b - \partial_b a_a \right) = \varepsilon^{cab} \partial_a a_b](https://static.techno-science.net/illustrationWebp/Definitions/autres/d/d11ae932cbdb2a2a401f8c3abbe9ac0b_c3df2eb2073cdc12f25b5080e57711ae.png)
C'est bien sûr cette expression-là qui doit être utilisée pour le calcul du rotationnel dans un système de coordonnées non cartésiennes (par exemple cylindriques ou sphériques, voir plus bas).
Vocabulaire
Un champ vectoriel dont le rotationnel est nul, est un champ irrotationnel.

















































