Dynamique des faisceaux de particules chargées - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
La dynamique des faisceaux de particules chargées est une discipline de la physique qui traite du transport et de l'optimisation des caractéristiques des faisceaux dans les accélérateurs de particules.
Le transport d'une particule chargée est décrit dans les champs électromagnétiques produits par l'accélérateur. On peut en déduire les propriétés propres à l'accélérateur (en relation avec un type de particule) qui vont permettre de définir :
- une particule de référence subissant le transport idéal dans l'accélérateur et dont la trajectoire devra être contrainte par les besoins des utilisateurs,
- un formalisme de transport (parfois linéaire) autour de cette particule de référence pour les particules non idéales qui devront demeurer dans une acceptance définie par de nombreux critères (dispersion en taille et divergence, courant perdu admissible). Cette acceptance permet de déterminer les meilleurs conditions d'injection et de transport du faisceau dans l'accélérateur.
Le faisceau de particules est caractérisé par des grandeurs statistiques (par exemple : dimension quadratique moyenne) dont on peut décrire analytiquement l'évolution au cours de l'accélération dans des conditions simplifiées de transport. Une simplification pertinente des paramètres permet une description rapide et très utile du comportement du faisceau pour la définition et le réglage des principaux éléments de l'accélérateur tels que les aimants ou les cavités accélératrices.
Fréquemment, le transport du faisceau à travers l'accélérateur est réalisé à l'aide de logiciels dédiés appelés codes de transport. On peut transporter alors, soit des propriétés statistiques du faisceau, soit un échantillonnage de macro-particules représentant le faisceau, soit la fonction de distribution du faisceau. Ces codes permettent d'accéder au calcul des interactions des particules avec leurs congénères (charge d'espace), le gaz résiduel (diffusion coulombienne, neutralisation, recombinaison) ou avec l'accélérateur (champs induits dans la structure). Ils permettent aussi de vérifier l'influence des imperfections de l'accélérateur sur les propriétés du faisceau.
Transport d'une particule
Représentation d'une particule - Espaces des phases
La dynamique des particules peut être décrite soit dans un référentiel galiléen (Bonne approximation du référentiel du laboratoire), soit dans un référentiel mobile lié à l'accélérateur.
Représentation classique dans un référentiel galiléen
Une particule de masse m et de charge q est décrite, à un instant t, par un point dans un espace des phases à 6 dimensions représentant :
- sa position :
-
-

-

- son déplacement (par exemple, sa quantité de mouvement) :
-
-

-

Plus généralement, 6 coordonnées (3 de position, 3 de déplacement) suffisent à décrire la dynamique de la particule en fonction d'une variable indépendante donnée (ici le temps).
Représentation dans un référentiel mobile
Un accélérateur de particule est conçu de manière à accélérer une particule de référence (dite particule synchrone) qui se propage sur une trajectoire de référence avec une chronométrie bien précise. Cette trajectoire de référence peut être linéaire (linac), circulaire (synchrotron) ou spirale (cyclotron).
- Il est alors très courant de choisir comme variable indépendante, non pas le temps, mais une abscisse s le long de la trajectoire de référence. L'abscisse associée à une particule correspond au point d'intercection entre la trajectoire de référence et le plan normal à cette trajectoire qui contient la particule.
-
-

-

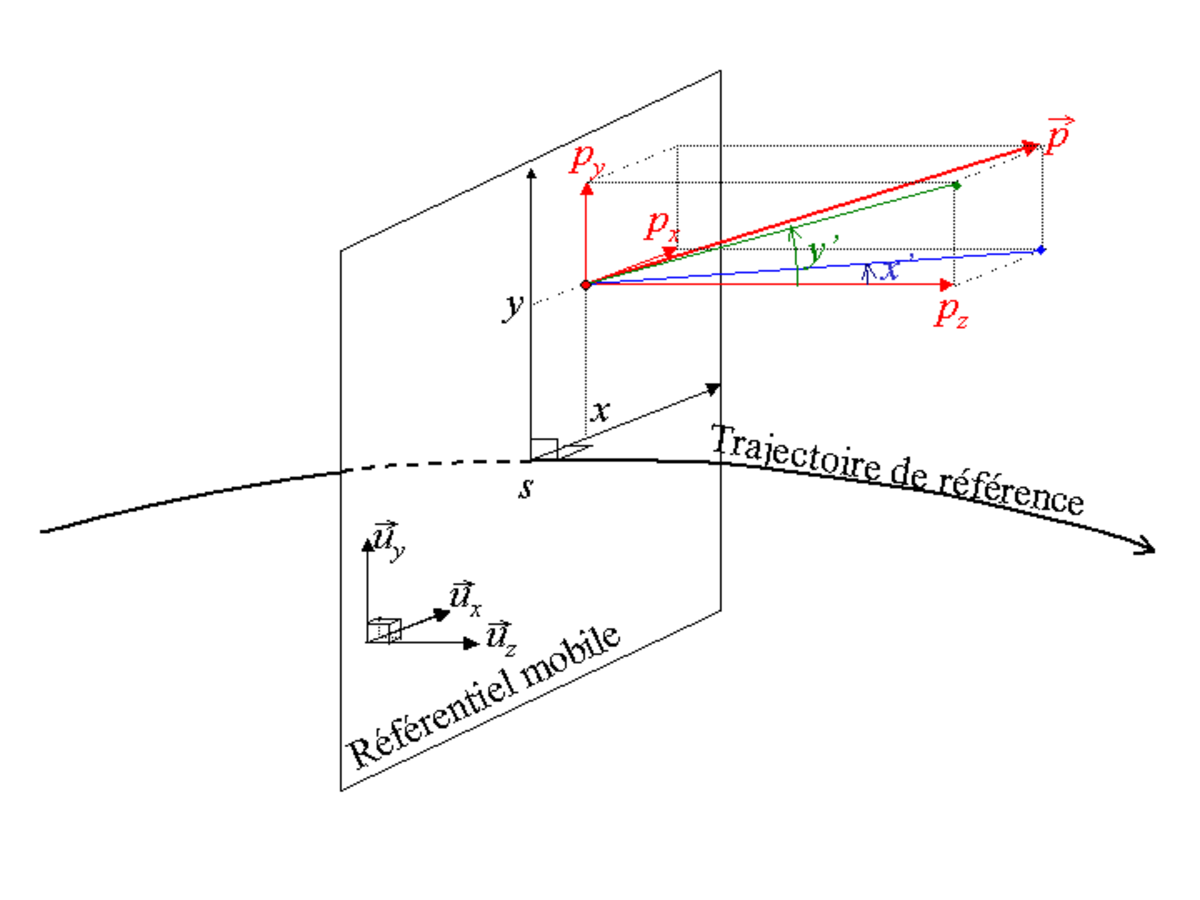
- En ce qui concerne sa position, la particule peut être repérée par ses 2 coordonnées (x,y) dans un référentiel mobile


-
-

-

- En ce qui concerne son déplacement, il est usuel de choisir, pour le plan transverse, les 2 pentes x' et y' de la particule par rapport à la trajectoire de référence. L'intérêt porte sur leur mesure et interprétation faciles. Pour la troisième composante du déplacement, on peut trouver, pêle-mêle, la quantité de mouvement p de la particule, la différence relative de la quantité de mouvement de la particule par rapport à celle de la particule synchrone δ, l'énergie cinétique de la particule E ou la différence d'énergie avec la particule synchrone ΔE.
-
-

-

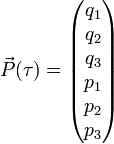
La particule pourra finalement être réprésentée par un vecteur à 6 composantes dont on exprimera l'évolution en fonction de la variable indépendante τ :
-
-
-

Equations du mouvement
Référentiel du laboratoire (galiléen)
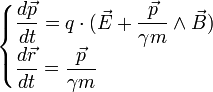
Les équations du transport de la particule dans un champ électromagnétique

-
-
-

où :
- γ est l'énergie réduite de la particule (ou facteur de Lorentz (appellation impropre dans ce cas présent)) reliée à la quantité de mouvement par la relation :
- .
- c est la constante de la physique correspondant à la vitesse de la lumière dans le vide.
Dans le référentiel galiléen, en utilisant le temps t pour variable indépendante, ces équations s'appliquent directement.
Référentiel mobile
Dans le référentiel mobile, en utilisant l'abscisse s pour variable indépendante, quelques transformations doivent être apportées. Elles sont dues au fait que les vecteurs de la base mobile

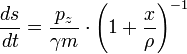
Soit ρ(s), le rayon de courbure de la trajectoire de référence au point s dans le plan


-
-

-

De plus, s étant la projection de la particule sur la trajectoire de référence, nous avons :
-
-
-

A partir de ces dernières équations et des équations du transport dans le référentiel galiléen, il est possible de déterminer les équations qui donnent les dérivées par rapport à s de chacune des coordonnées des particules dans l'espace des phases choisi.
Quel que soit le référentiel
Finalement, quel que soit le référentiel, si τ est la variable indépendante (t ou s), l'équation vectorielle du transport peut s'écrire :
-
-
-

Linéarisation - transport matriciel
Dans ce paragraphe, nous introduisons un formalisme propre aux accélérateurs, et nous choisissons délibérément l'abscisse s pour variable indépendante. La justification est donnée par la suite.
Le traitement le plus simple du transport d'une particule consiste à :
- Utiliser ses coordonnées relatives à la particule synchrone,
-
-
-

- Linéariser la variation de la force de rappel vers la particules synchrone.
-
-
-

On obtient alors les équations d'évolution des composantes :
-
-
-

On peut alors utiliser le formalisme matriciel pour transporter la particule d'un point s à un point s+ds :

Soit :

Ce formalisme matriciel peut être utilisé pour aller d'un point s0 à un point s1:
-
-

-


Formellement, elle peut s'obtenir à partir de la multiplication des matrices sur des petits pas ds de s0 à s1 (ce qui revient à intégrer pas à pas les équations du transport) :
-
-

-

Concrètement, l'accélérateur est découpé en une succession d'éléments Ei dont on connaît les matrices de transfert Ti.
Le transport de l'entrée de l'élément i à la sortie de l'élément j (ou à l'entrée de l'élément j+1, avec j>i) est alors donné par la matrice de transfert :
-
-

-

On peut, par cette méthode, transporter les particules élément après élément tout le long de l'accélérateur.
C'est justement parce que les éléments sont positionnés tout le long de l'accélérateur que nous avons choisi l'abscisse s comme variable indépendante. L'utilisation du temps comme variable indépendante pose des difficultés car, à un instant t donné, toutes les particules ne sont pas forcément dans le même élément de l'accélérateur. Il faudrait une matrice par particule !!

















































