Logique floue - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
La logique floue (fuzzy logic, en anglais) est une technique utilisée en intelligence artificielle. Elle a été formalisée par Lotfi Zadeh en 1965 et utilisée dans des domaines aussi variés que l'automatisme (freins ABS), la robotique (reconnaissance de formes), la gestion de la circulation routière (feux rouges), le contrôle aérien, l'environnement (météorologie, climatologie, sismologie, analyse du cycle de vie), la médecine (aide au diagnostic), l'assurance (sélection et prévention des risques) et bien d'autres.
Elle s'appuie sur la théorie mathématique des ensembles flous. Cette théorie, introduite par Zadeh, est une extension de la théorie des ensembles classiques pour la prise en compte d'ensembles définis de façon imprécise. C'est une théorie formelle et mathématique dans le sens où Zadeh, en partant du concept de fonction d'appartenance pour modéliser la définition d'un sous-ensemble d'un univers donné, a élaboré un modèle complet de propriétés et de définitions formelles. Il a aussi montré que cette théorie des sous-ensembles flous se réduit effectivement à la théorie des sous-ensembles classiques dans le cas où les fonctions d'appartenance considérées prennent des valeurs binaires ({0,1}).
Elle présente aussi l'intérêt d'être plus facile et meilleur marché à implémenter qu'une logique probabiliste, bien que cette dernière seule soit stricto sensu cohérente (voir Théorème de Cox-Jaynes). Par exemple la courbe Ev(p) peut être remplacée par trois segments de droite sans perte excessive de précision pour beaucoup d'applications considérées ci-dessus.
Principe
À l'inverse de la logique booléenne, la logique floue permet à une condition d'être en un autre état que vrai ou faux. Il y a des degrés dans la vérification d'une condition.
Considérons par exemple la vitesse d'un véhicule sur une route nationale française. La vitesse normale est de 90 km/h. Une vitesse peut être considérée comme élevée au-dessus de 100 km/h, et comme plus du tout élevée en dessous de 80 km/h.
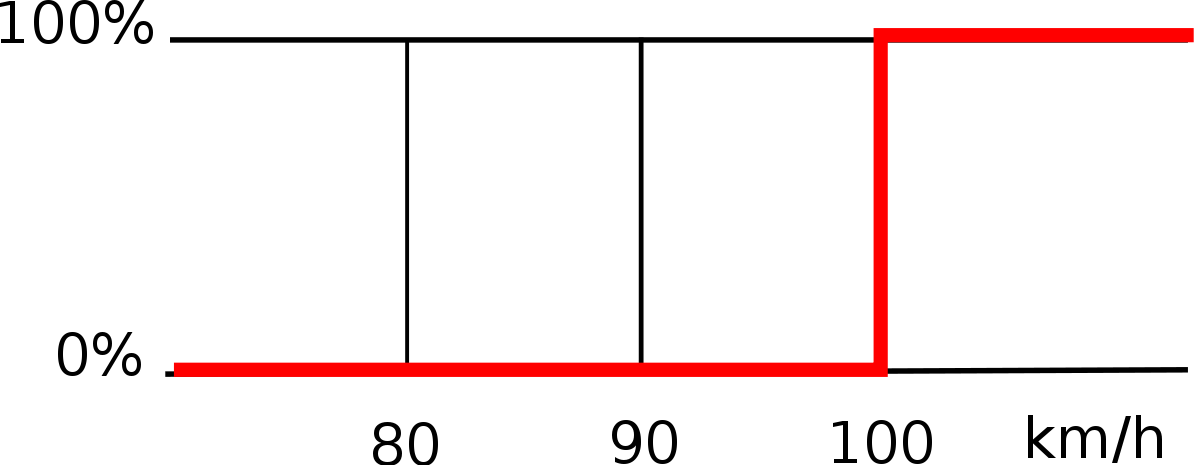
fig. 1 |
La logique booléenne envisagerait les choses de la manière suivante (voir fig. 1) :
- La vitesse est considérée à 100 % comme élevée à partir de 100 km/h, et à 0 % en dessous.
La logique floue, à l'inverse, permet des degrés de vérification de la condition « La vitesse est-elle élevée ? » (voir fig. 2) :
- La vitesse est considérée comme pas du tout élevée en dessous de 80 km/h. On peut donc dire qu'en dessous de 80 km/h, la vitesse est élevée à 0 %.
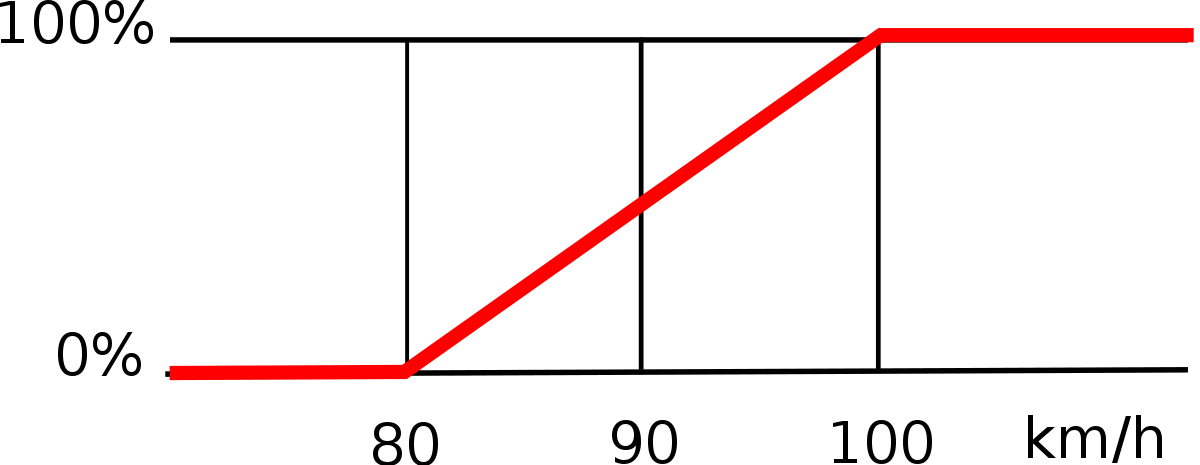
fig. 2 |
- La vitesse est considérée comme élevée au-dessus de 100 km/h. La vitesse est donc élevée à 100 % au-dessus de 100 km/h.
- La vitesse est donc élevée à 50 % à 90 km/h, et à 25 % à 85 km/h.
De la même manière, la fonction « La vitesse est-elle peu élevée ? » sera évaluée de la manière suivante (voir fig. 3) :
- La vitesse est considérée comme peu élevée en dessous de 80 km/h. Elle est donc peu élevée à 100 %.
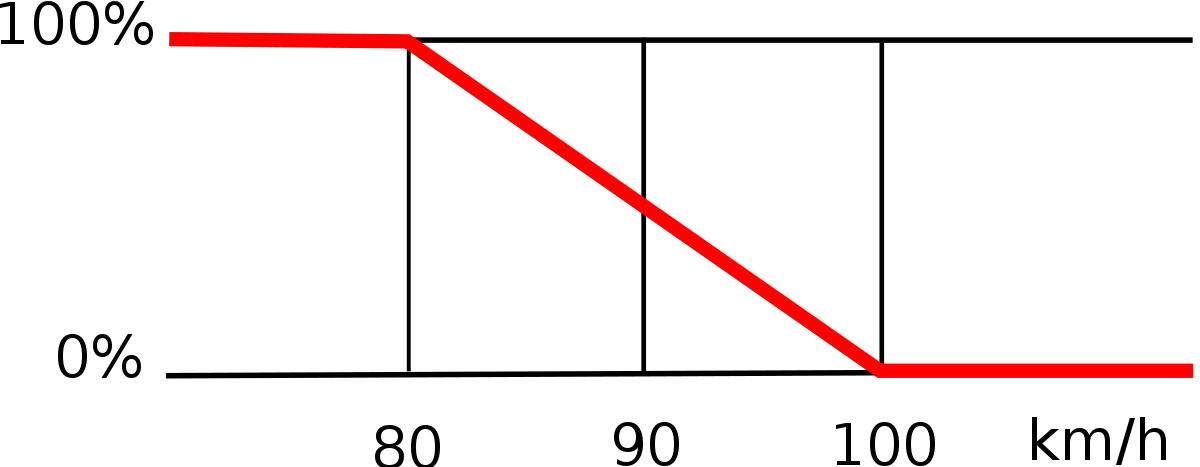
fig. 3 |
- La vitesse est considérée comme pas du tout peu élevée au-dessus de 100 km/h. Elle est donc peu élevée à 0 %.
- La vitesse est donc peu élevée à 50 % à 90 km/h, et à 25 % à 95 km/h.
On peut également définir une fonction « La vitesse est-elle moyenne ? » (voir fig. 4) :
- La vitesse est moyenne à 90 km/h. À cette allure, la vitesse est moyenne à 100 %.
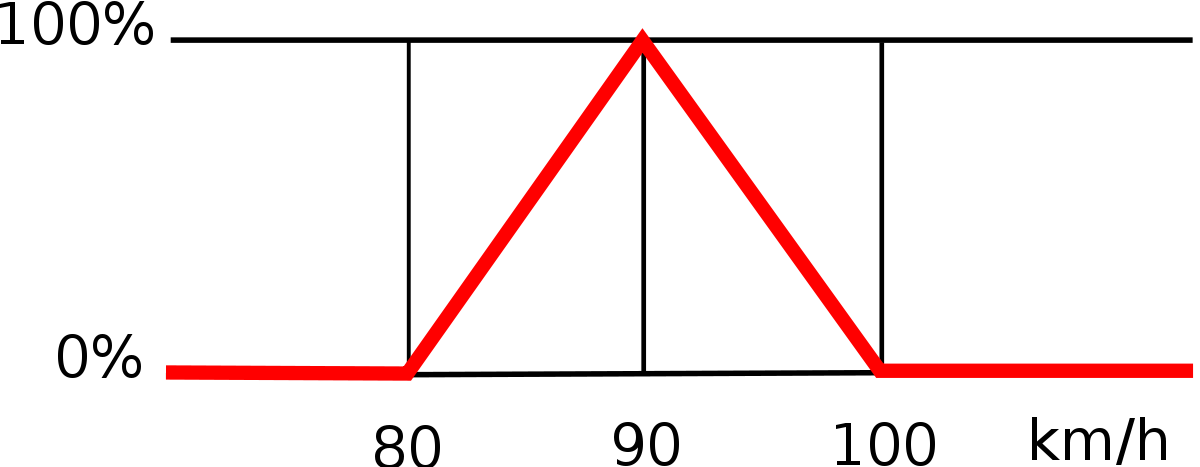
fig. 4 |
- La vitesse n'est pas du tout moyenne en dessous de 80 km/h et au-dessus de 100 km/h. Hors de cet intervalle, la vitesse est moyenne à 0 %.
- La vitesse est donc moyenne à 50 % à 85 km/h et 95 km/h.
Il n'est pas obligatoire que la transition soit linéaire. Des transitions hyperboliques (comme une sigmoïde ou une tangente hyperbolique), exponentielle, gaussienne (dans le cas d'un état moyen) ou de toute autre nature sont utilisables (voir fig. 5).
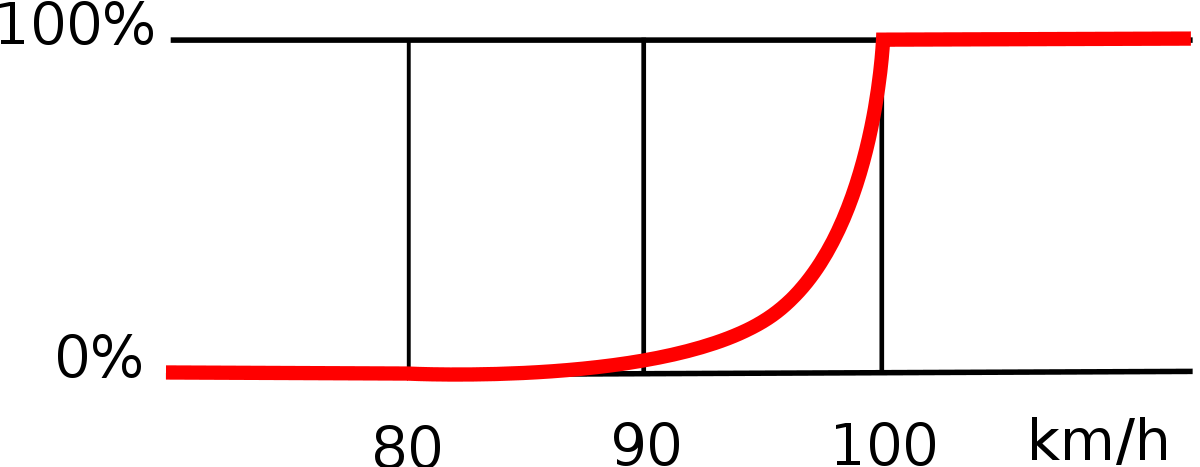
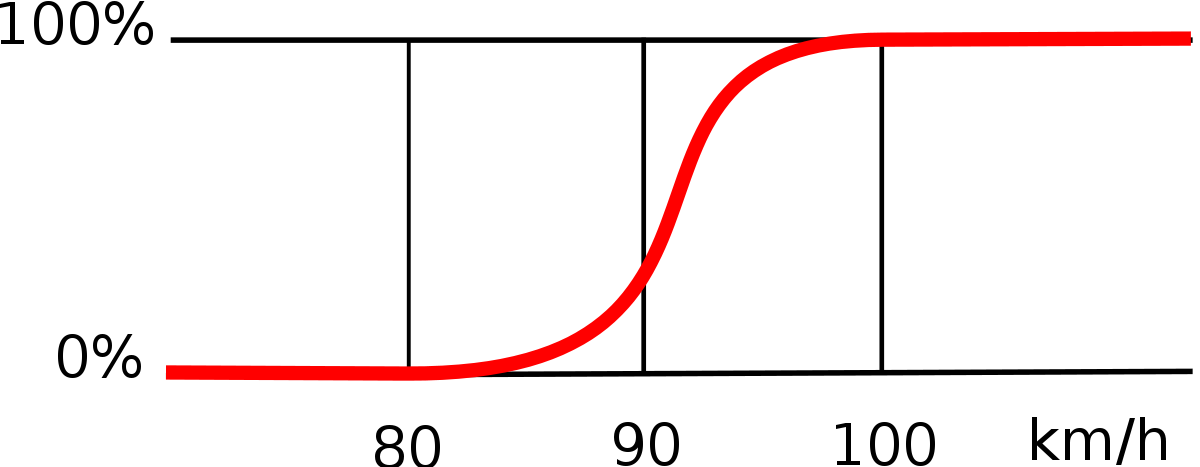
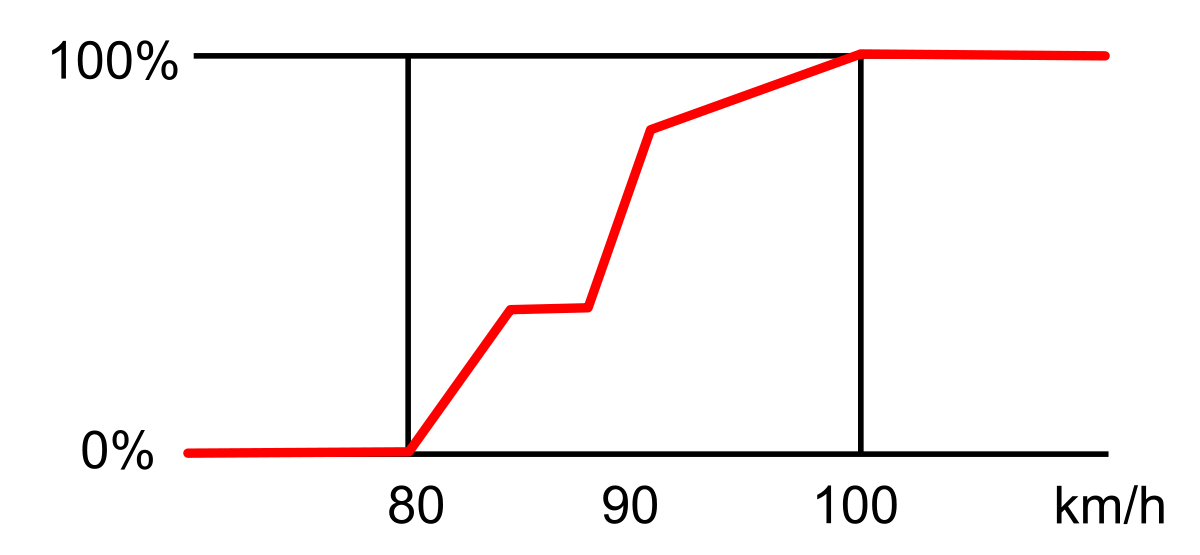
fig. 5 |

















































