Projection conique conforme de Lambert - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
La projection conique conforme de Lambert, ou plus simplement, la projection de Lambert est l'une des projections cartographiques présentées par le mathématicien mulhousien Johann Heinrich Lambert en 1772.
Dans ce système de projection conforme, les méridiens sont des droites concourantes, et les parallèles des arcs de cercle centrés sur le point de convergence des méridiens.
Le système a été adopté par l'artillerie française au cours de la Première Guerre mondiale pour les cartes à grande échelle (1/20 000 et au-dessus), une carte conforme étant nécessaire pour la préparation des tirs, ce que ne permettait pas la projection de Bonne alors en usage.
Elle est depuis cette époque la projection officielle utilisée pour représenter la France métropolitaine, avec différents paramètres successifs suivant les époques. C'est aussi la projection officielle en Belgique et en Estonie, ainsi que pour les cartes couvrant toute l'Europe à des échelles inférieures ou égales au 1:500 000.
Définition
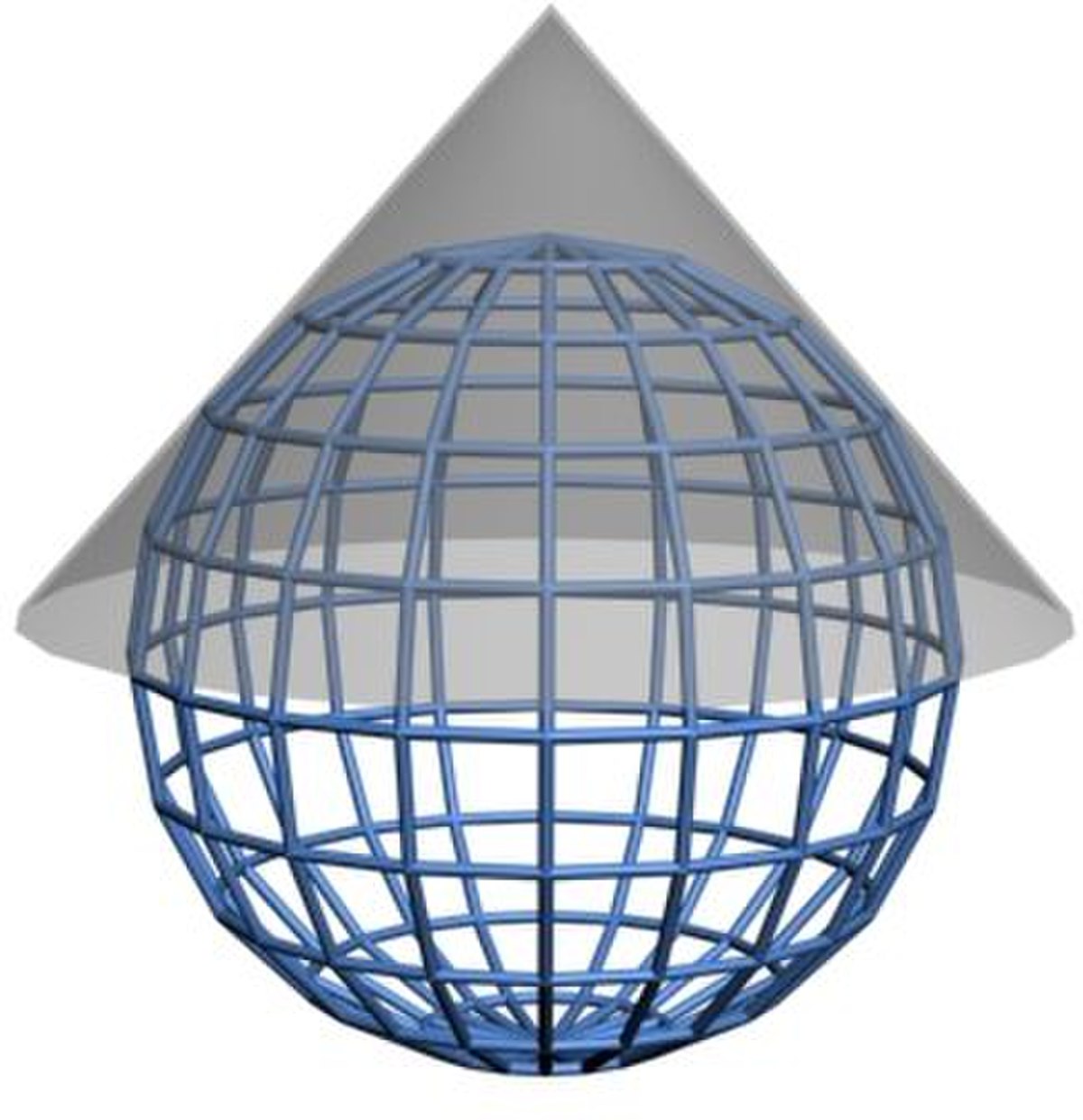
Cette projection est une projection conique conforme (qui conserve les angles).
Le sommet du cône appartient à l'axe des pôles et est tangent à un ellipsoïde de référence en un point défini par un méridien de référence et un parallèle de référence de latitude φ0 qui est aussi l'angle au sommet du cône. Le cône peut également être sécant à l'ellipsoïde au niveau de deux parallèles, dits alors parallèles automécoïques φ1 et φ2. La définition d'une projection de Lambert peut ainsi se faire soit par un parallèle tangent et un facteur d'échelle, soit par deux parallèles sécants et isométriques.
Le cône est ensuite développé sur un plan, sans déformation.
Dans cette projection on retrouve :
- les parallèles (latitude constante) sont des cercles concentriques autour du point P, projection du pôle Nord et sommet du cône.
- les méridiens (longitude constante) sont des droites concourantes en P.
- l'axe des ordonnées est la projection du méridien de référence.
- l'origine se trouve au point de référence.
- le cercle, projection du parallèle de référence, est appelé isomètre ou isomètre de référence. En effet, c'est selon ce cercle que l'on définit l'échelle de la carte.
- les angles sont conservés.
La déformation linéaire est relativement importante lorsque l'on s'éloigne du parallèle d'origine, il est donc courant de définir des zones différant par leur angle φ0.
Enfin cette projection étant utilisée en cartographie, pour éviter d'avoir des abscisses et des ordonnées négatives, on effectue une translation en affectant des coordonnées positives au point de référence.
Formules mathématiques
Pour l'application numérique, on rappelle ici les paramètres pour la projection Lambert 93 :
- a = 6 378 137 m
- b = a.(1 - f)
- f = 1 / 298.257222101
- φ0 = 46°30
- φ1 = 44°
- φ2 = 49°
- λ0 = 3°
- X0 = 700 000 m
- Y0 = 6 600 000 m
Des coordonnées géographiques (lat, lon) aux cartographiques (X, Y)
Partant d'un point (φ, λ) du globe supposé être une ellipsoïde de demi-grand axe a et de demi-petit axe b, calculons ses coordonnées (X, Y) sur la carte. Pour cela, nous allons passer par les coordonnées (ρ, θ) du point projeté sur le cône. L'axe des X est croissant vers l'est et l'axe des Y croissant vers le nord.


Puisque c'est une projection conforme pour un point M à la surface de la terre :

On peut donc calculer ρ le long du méridien d'origine (λ = λ0)


Le méridien est une ellipse d'équation :
![\left\{\begin{matrix} r & = a\cos(t) \\ z & = b\sin(t)\end{matrix}\right.\forall t \in [0;2\pi]](https://static.techno-science.net/illustrationWebp/Definitions/autres/e/e623c710c7605ae62abf68fa4dc77b3d_16444012af2262581eb224158c5d1e46.png)
La latitude étant l'angle que fait le méridien du lieu avec le plan équatorial, on trouve :




On peut dériver (4) par rapport à φ :

Ce qui donne en regroupant les trois dernières équations :

Et en regroupant (1), (2), (3), (5) et (6) :



Or



Et finalement en utilisant les dérivées de la fonction


On peut donc réécrire l'équation (7) en :


Nous allons travailler ici avec deux parallèles sécants de référence. Sur ces parallèles, appelés automécoïques, de latitude





Des coordonnées cartographiques (X,Y) aux géographiques (lat, lon)
De même que ci-dessus nous allons passer par les coordonnées (ρ, θ) du point projeté sur le cone :


Comme on a vu plus haut, on a alors :


Si on appelle F la fonction de gauche, puisque F est strictement décroissante :

Mais le calcul de F − 1 n'est pas trivial. Pour calculer φ avec une précision arbitraire, puisque F est continue sur son intervalle de définition, on peut utiliser un algorithme dichotomique. On peut aussi, pour plus de rapidité, utiliser l'algorithme proposé par l'IGN :
-

-

- jusqu'à ce que





















































