Hélicoptère radiocommandé - Définition
La liste des auteurs de cet article est disponible ici.
Introduction

Un hélicoptère radiocommandé (RC) est un modèle réduit d'aéronef dont les caractéristiques sont différentes d'un avion radiocommandé du fait de différences de construction, d'aérodynamique et d'expériences de vol.
L'hélicoptère radiocommandé est une machine à mécanique complexe, qui contrairement à d'autres machines volantes, permet d'effectuer des vols dans toutes les directions (translations avant, arrière, lattérales) et de rester parfaitement immobile (vol stationnaire) au-dessus d'un point. De plus, ces hélicoptères radiocommandés, dans les mains de pilotes confirmés, sont capables de réaliser des prouesses (vol 3D ou voltige) qui ne sont pas réalisables avec des hélicoptères grandeur nature (sauf exceptions, comme Le Tigre d'Eurocoptere ou BO 105 capables de véritables exploits).
Histoire
Les premiers modèles réduits d'hélicoptères à moteur (mécanisme d'horlogerie ou ressort) ont existé dès le XVIIIe siècle, mais ils n'étaient évidemment pas radiocommandés. Après une longue phase de recherche, c'est en 1907 que l'hélicoptère a été capable de se soulever avec un pilote, pour véritablement prendre son essor après 1945, éclipsant les modèles réduits.
Le premier véritable hélicoptère radiocommandé a été conçu en 1969 par Dieter Schlüter. Ce modèle a gagné le concours Harsewinkel (Allemagne) pour lequel l'inventeur toucha 1 000 DM. Il a réussi à faire voler son hélicoptère sur deux vols de 5 secondes, à 3 mètres du sol. Le premier modèle commercialisé a été le Bell Huet cobra Schlüter, qui a établi un nouveau record (non officiel) avec un vol de 10 minutes 36 secondes. Le record officiel, de juin 1970, avec ce même modèle a été de 27 minutes 51 secondes de vol sur un circuit de 11,5 km. Le Twin Jet de Graupner équipé d'un moteur thermique de 10 cm3 et du pas collectif a été le premier hélicoptère radiocommandé à traverser la Manche. Ensuite, de nombreux modèles ont été commercialisés avant d'en arriver aux hélicoptères actuellement sur le marché.
Depuis, de nombreux prototypes ont été construits et testés jusqu'en 1980, date à partir de laquelle les hélicoptères radiocommandés Graupner ont fait leur apparition. L'utilisation de ces engins est devenue accessible à un large public à partir de 2000, où des marques comme Nikko ont conçu des hélicoptères électriques relativement bon marché et peu puissants pour le vol en intérieur ou dans un jardin.
Types de vol
Les hélicoptères radiocommandés ont un fonctionnement presque identique à celui des hélicoptères.
Aspect physique
Comme pour l'avion, la vitesse relative de l'air et de la voilure génère une action mécanique qui permet à l'engin de voler. On distingue deux composantes de cette action aérodynamique :
- la traînée qui est la résistance à l'avancement. De son action sur le rotor de l'hélicoptère, il résulte un couple tendant à faire tourner l'appareil autour de son axe, d'où la nécessité d'un dispositif anticouple.
- la portance qui soulève l'appareil.
Le contrôle d'un appareil repose alors sur la gestion de cette portance. Alors que sur les avions, des gouvernes permettent de modifier la portance des ailes pour virer, monter..., sur l'hélicoptère, comme sur les éoliennes, on modifie le pas et l'inclinaison des pales. Cependant, il existe une différence. Si sur l'avion on agit individuellement sur chaque gouverne, sur l'hélicoptère on contrôle la portance d'une pale suivant sa position par rapport à l'appareil. C'est le rôle du plateau cyclique, pièce principale du dispositif de commande de vol.
Certains types sont plus manœuvrables que d'autres (comme les hélicoptères à pas collectif). Les modèles les plus manœuvrables sont souvent les plus compliqués à faire voler, mais bénéficient de meilleures capacités acrobatiques.
Déplacements
Vol stationnaire
Le rotor de l'hélicoptère étant entraîné à vitesse constante, les déplacements verticaux de l'hélicoptère sont obtenus par la seule modification du pas des pales. À ce stade du vol, la portance des pales reste identique sur un tour du rotor.
Il existe une position où la portance globale s'oppose exactement au poids de l'appareil : l'hélicoptère peut rester immobile. Si elle lui est inférieure, l'appareil descend. Si elle est supérieure, il monte.
Vol en translation
Pour que l'hélicoptère avance, une force à composante horizontale est nécessaire. Si on augmente la portance des pales lorsqu'elles sont 90° avant de passer au dessus de la poutre du rotor de queue (décalage angulaire du aux forces gyroscopiques), leur plan de rotation s'incline vers l'avant, grâce à une articulation en battement reliant chaque pale à l'axe de rotation, et l'inclinaison de la portance produit la composante horizontale nécessaire. Il reste toutefois une composante verticale principale qui s'oppose au poids permettant le maintien en l'air, et la composante horizontale motrice engendre le mouvement d'avancement, donc accélération jusqu'à une vitesse où la traînée globale (résistance à l'avancement de l'hélicoptère) s'équilibrera avec la composante motrice.
Le principe est le même quelle que soit la direction de déplacement souhaitée.
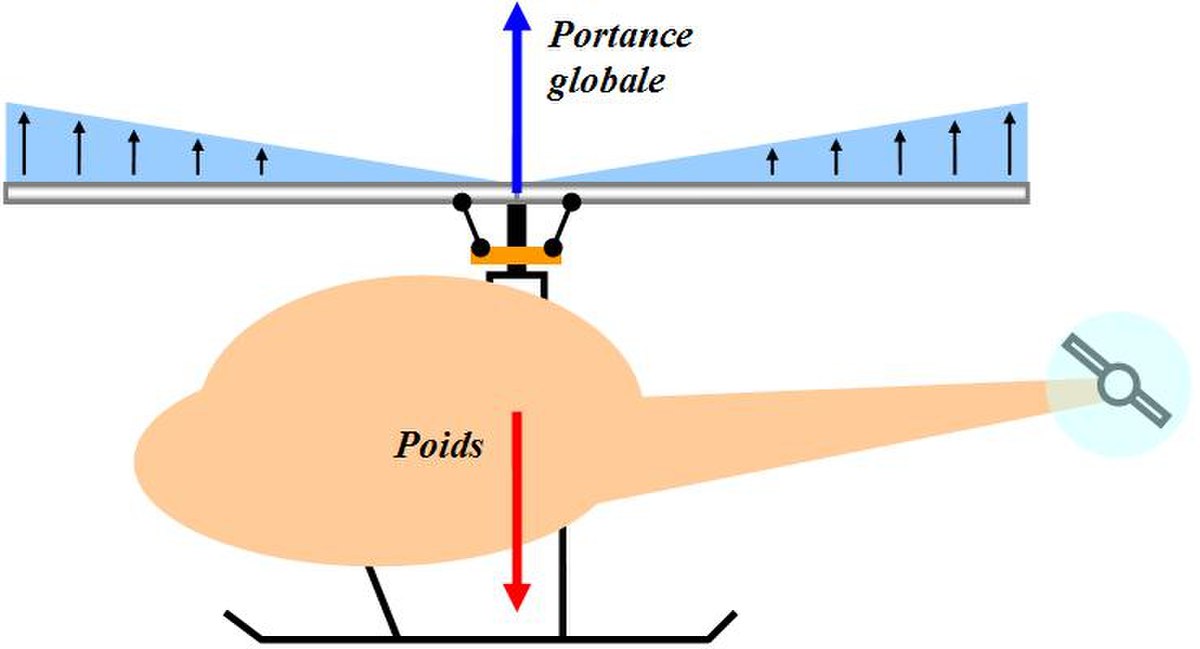
Équilibre en vol stationnaire : la portance et le poids s'annulent | 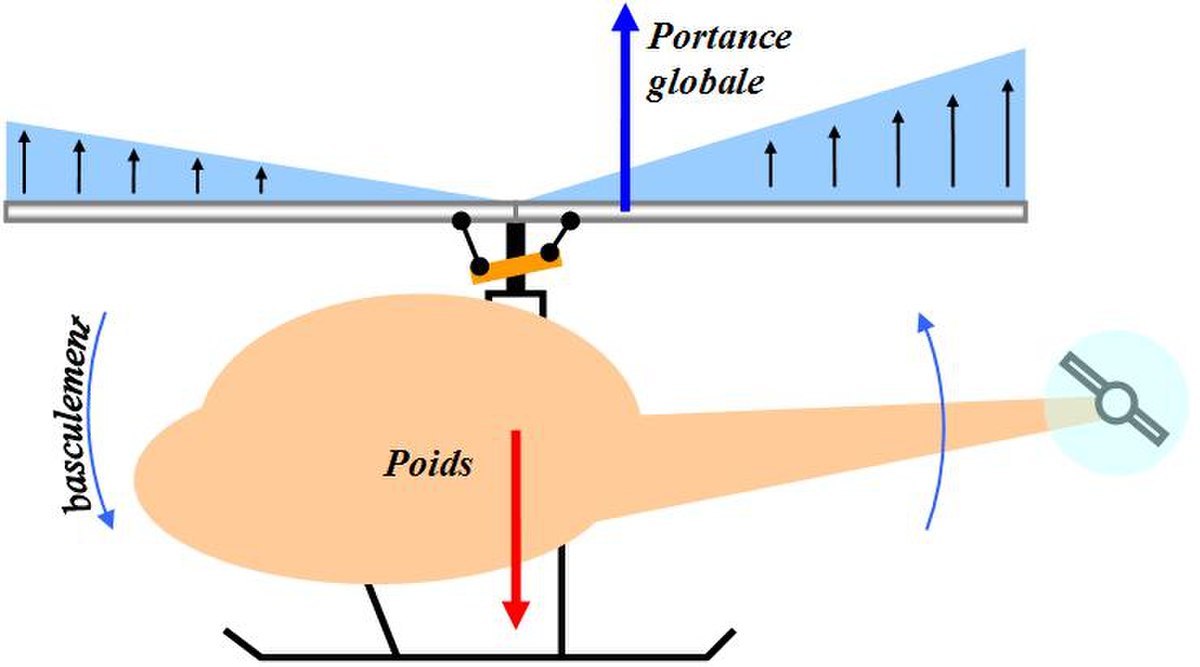
Déséquilibre : la queue va vers le haut, l'hélicoptère est déséquilibré | 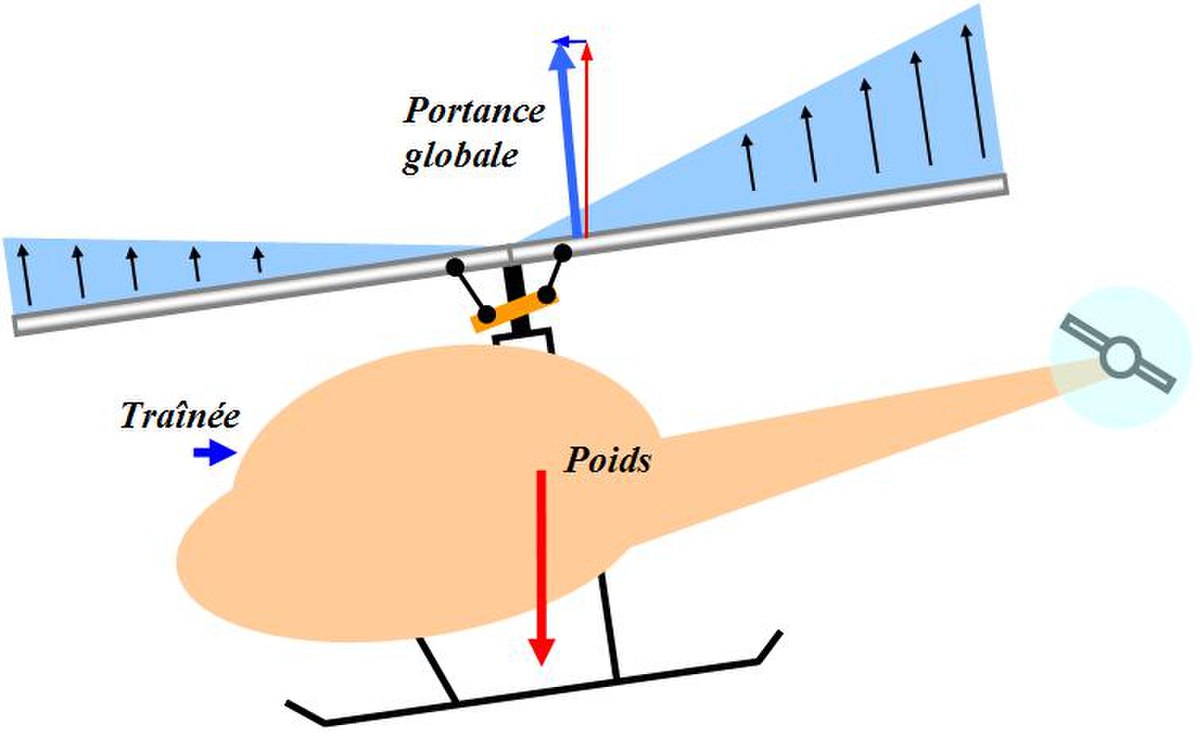
Déplacement stabilisé : la traînée s'ajoute à la portance et au poids ; l'hélicoptère avance |
Autorotation
Cette phase est une procédure d'urgence en cas de panne du moteur entraînant le rotor principal. Le principe est de passer en mode autogire : dans ce mode, les pales tournent spontanément sous l'effet du vent relatif produit par la chute (de bas en haut, du point de vue de l'hélicoptère) en produisant une portance qui freine significativement la chute de l'aéronef à l'approche du sol, et permet ainsi de limiter la casse. Pour cela, une commande permet d'inverser le pas collectif. Cela reste une manœuvre délicate, car l'orientation optimale des pales dépend des circonstances (vitesse de chute, vitesse actuelle des pales, ...) et le succès n'est pas garanti, même si en théorie le simple fait de laisser les pales en mode libre suffit.
Sur un hélicoptère modèle réduit, l'autorotation n'en est pas vraiment une ; c'est plutôt le phénomène de moulinet-frein (rotor entraîné par l'air de bas en haut avec le pas négatif) alors que sur les hélicoptères grandeur nature, l'autorotation est une force d'entraînement du rotor (force autorotative) par les filets d'air de haut en bas sur la partie du disque rotor externe et de bas en haut (force anti-autorotative) sur la partie interne du disque, et ceci pour un pas positif : le « pas mini » calé par le constructeur. La vitesse du rotor est auto-régulée et déterminée pas le taux de chute, la masse et les paramètres dynamiques de l'appareil (rotor et pales).

















































