Mariner 4 - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
Mariner 4 est la quatrième d'une série de sondes spatiales pour l'exploration interplanétaire par survol. Elle réalisa le premier survol de la planète Mars, envoya les premières images de la surface martienne et par là même les premières images rapprochées d'une autre planète. Les photos de la surface stérile et parsemée de cratères étonnèrent la communauté scientifique.
Mariner 4 fut conçue pour l'observation scientifique rapprochée et la transmission différée de ces observations vers la Terre. Les autres objectifs de mission concernaient l'étude du milieu interplanétaire et du voisinage de Mars.
La sonde et ses sous-systèmes
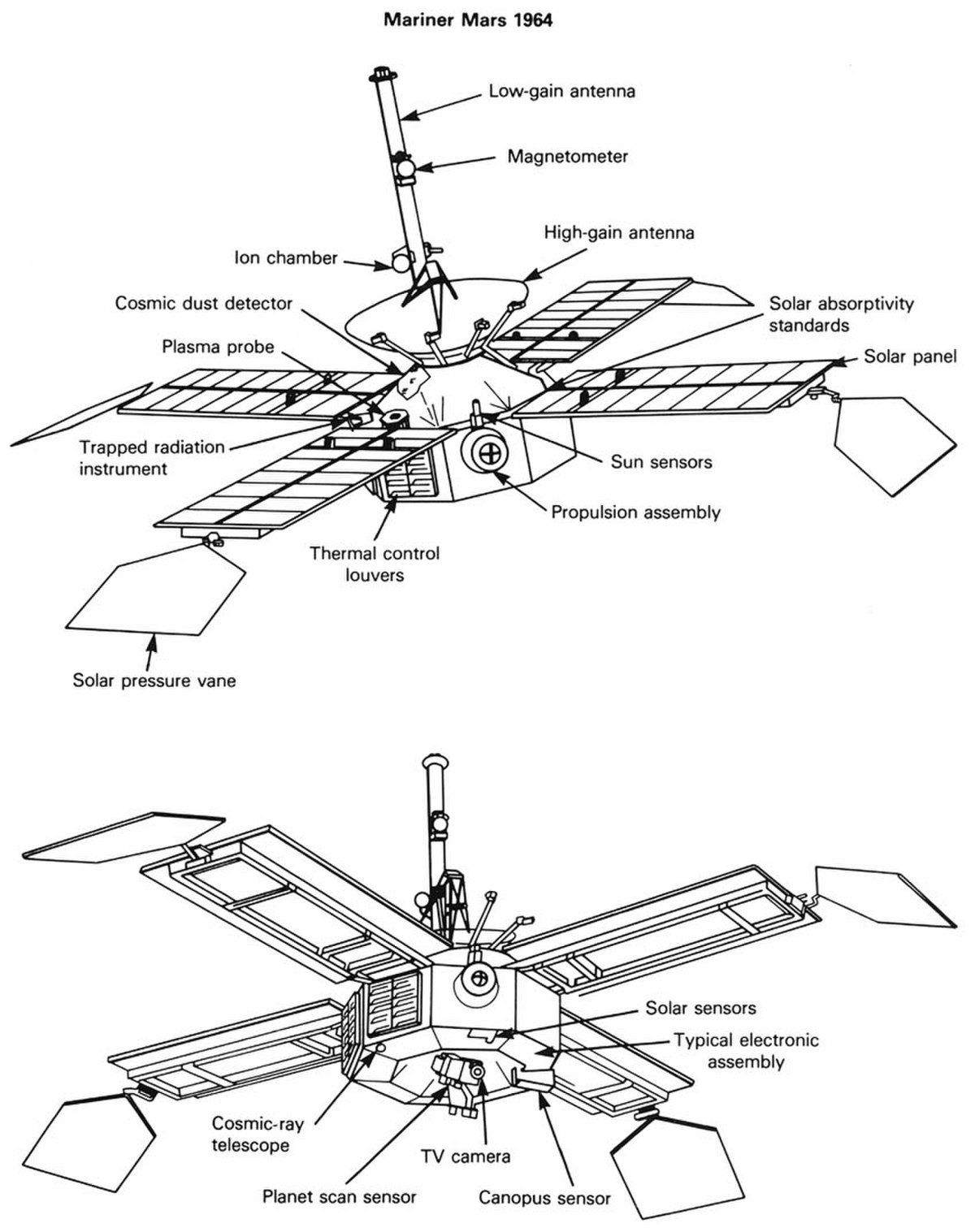
La sonde Mariner 4 est constituée d'un châssis en forme de prisme octogonal de 1,27 m de diagonale et de 45,7 cm de hauteur. Quatre panneaux solaires de 176×90 cm prolongés par des pales solaires de 0,65 m2 sont fixés au sommet du châssis, conférant au véhicule une envergure de 6,88 m. Une antenne parabolique fixe à haut gain de 1,168 m de diamètre est montée au centre du sommet du châssis tandis qu'une antenne omnidirectionnelle à faible gain est montée à l'extrémité d'un mât de 2,235 m enchâssé au pied de la parabole. La hauteur totale de l'engin est de 2,89 m.
Sur la base du châssis, la caméra de télévision est montée sur sa plateforme d'observation. Les faces du châssis octogonal sont constituées par les paniers à équipements électroniques et le système de propulsion pour la correction à mi-course. À l'intérieur de cet octogone se trouvent les tubulures de rigidification et les réserves de carburant pour la propulsion et le contrôle d'attitude, qui profitaient ainsi d'un espace à température contrôlée. La température était maîtrisée par une isolation thermique, par la radiativité des diverses surfaces et était régulée par des persiennes mobiles sur six des faces de l'octogone. Les instruments scientifiques se trouvent hors du châssis.
Les 28 224 cellules photovoltaïques des panneaux solaires permettaient de fournir 700 W au niveau de la Terre et 310 W au niveau de Mars. Un accumulateur électrique Argent-Zinc de 1200 W.h était utilisé lors des phases où les panneaux n'étaient pas orientés vers le Soleil.
La propulsion principale était assurée par un moteur de 222 N à monergol hydrazine commandant son vecteur poussée par quatre gouvernes de jet, situé sur une des faces de l'octogone. Le contrôle d'attitude était opéré par 6 paires de propulseurs à azote froid situés aux extrémités des panneaux solaires, trois gyroscopes et accessoirement par les pales solaires. L'attitude de la sonde était vérouillée en tangage et lacet par des pointeurs solaires l'orientant automatiquement face au soleil, puis le roulis était ajusté par un pointeur vers Canopus, étoile brillante proche du pôle Sud écliptique, cette dernière opération prenant alors près d'une journée à être effectuée.
Le système de télécommunication opérait en bande S et était composé d'un simple récepteur et d'un émetteur basé soit sur une triode double à 7 W, soit sur un tube à ondes progressives à 10 W, les données pouvaient être reçues ou émises à 331/3 bit/s ou 81/3 bit/s, ces diverses options dépendaient de l'éloignement de la sonde. Les données pouvaient également être stockées sur un enregistreur 4 pistes d'une capacité de 5,24 Mbits pour être transmises ultérieurement.

















































