Cassini (sonde spatiale) - Définition
Source: Wikipédia sous licence CC-BY-SA 3.0.
La liste des auteurs de cet article est disponible ici.
La liste des auteurs de cet article est disponible ici.
Sous-systèmes
La sonde Cassini est composée de 12 sous-systèmes :
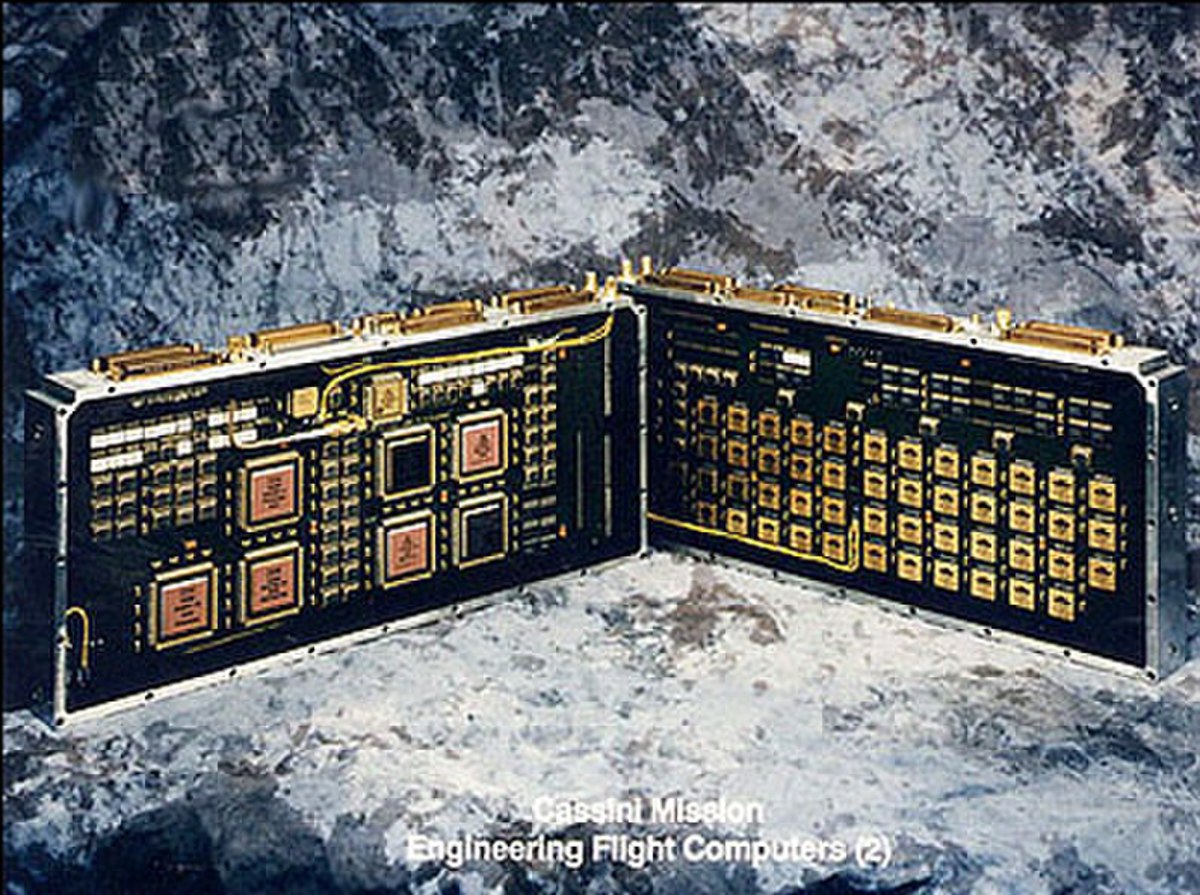

- Sous-système de commande et de gestion des données (Command and data subsystem - CDS) : Il s'agit du système informatique de la sonde. Il enregistre et traite les données en provenance des autres sous-systèmes et instruments. Outre les commandes en provenance de la base terrestre, il est en mesure d'exécuter des logiciels de protection lui permettant de maintenir la sonde en état de fonctionnement. Le cœur du système est l'Engineering Flight Computer, conçu par IBM, qui s'interface avec le reste de la sonde au travers d'un bus unique.
- Enregistreur à semi-conducteurs (Solid state recorder) : Ce système enregistre les données scientifiques ainsi que les données concernant la situation et l'état de la sonde. Cet enregistreur ne comporte aucune partie mobile, ce qui est une première. Il contient aussi des données de vol essentielles pour la suite de la mission. Les données scientifiques sont périodiquement envoyées à la base terrestre puis effacées.
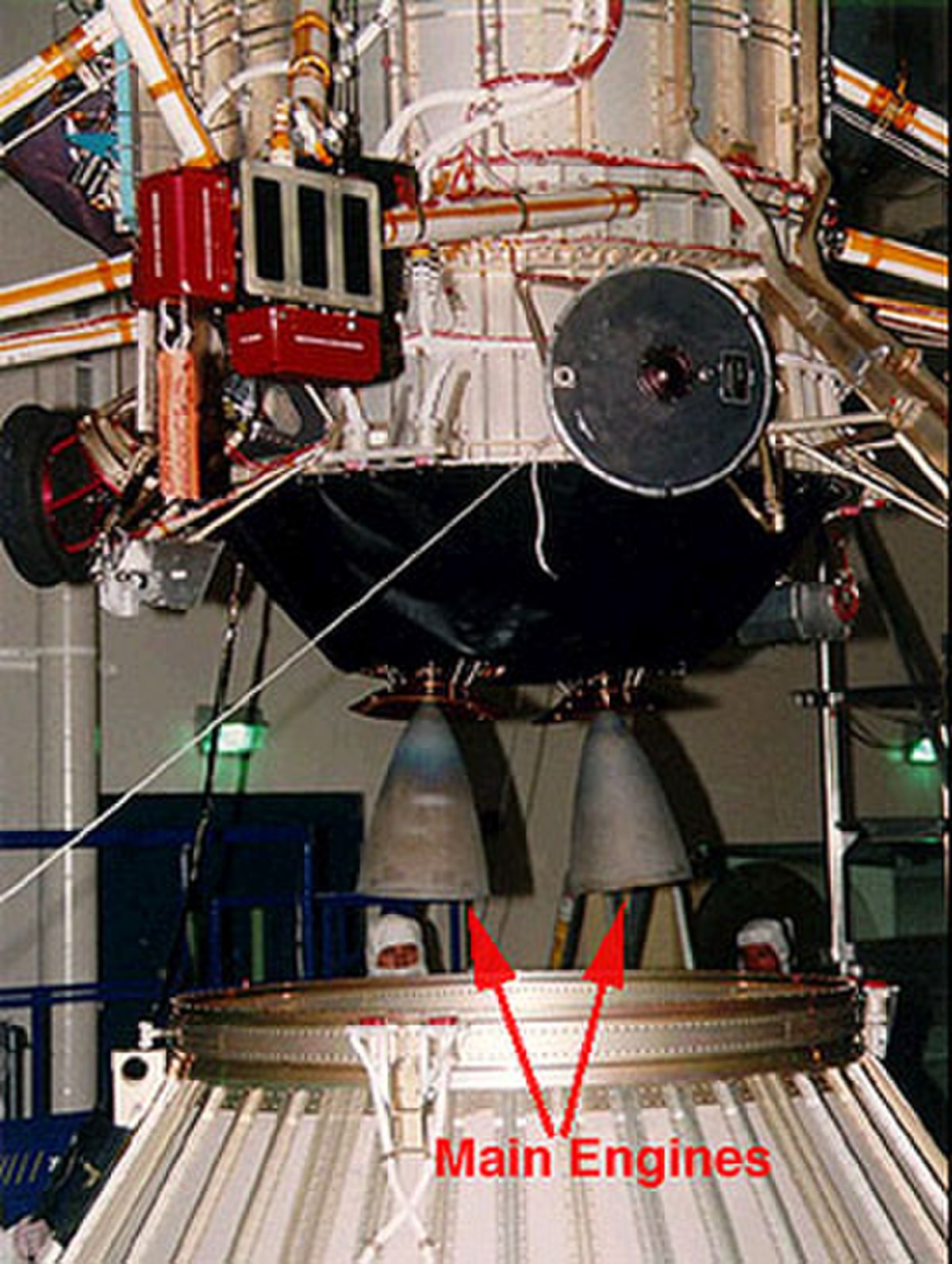
- Sous-système module de propulsion : Ce système fournit la poussée nécessaire aux changements de trajectoire et d'orientation. Le moteur principal est utilisé pour les corrections de vitesse et de trajectoire, tandis que 16 moteurs secondaires à hydrazine, disposés en quatre groupes de quatre, sont utilisés pour les corrections d'orientation.
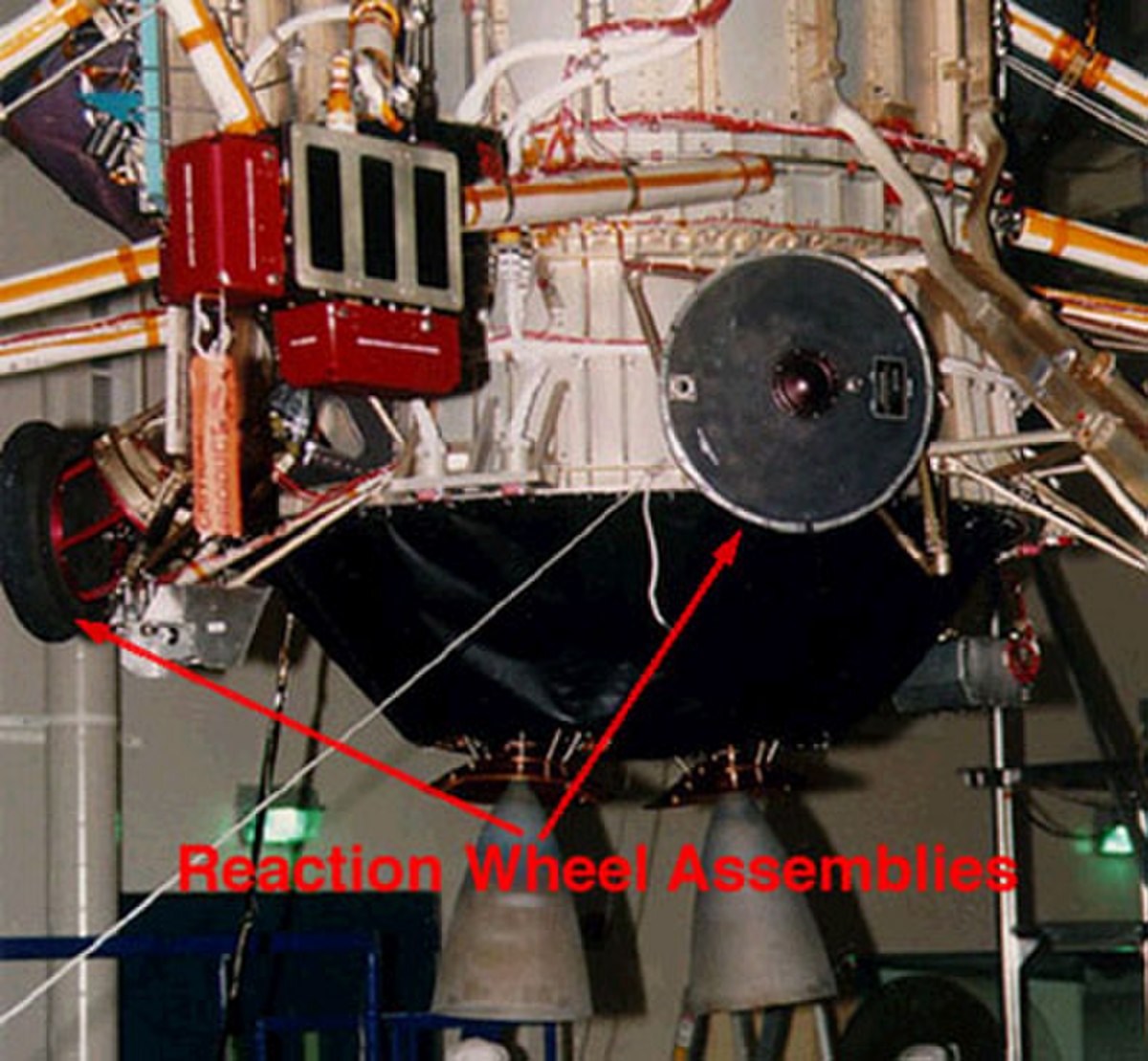
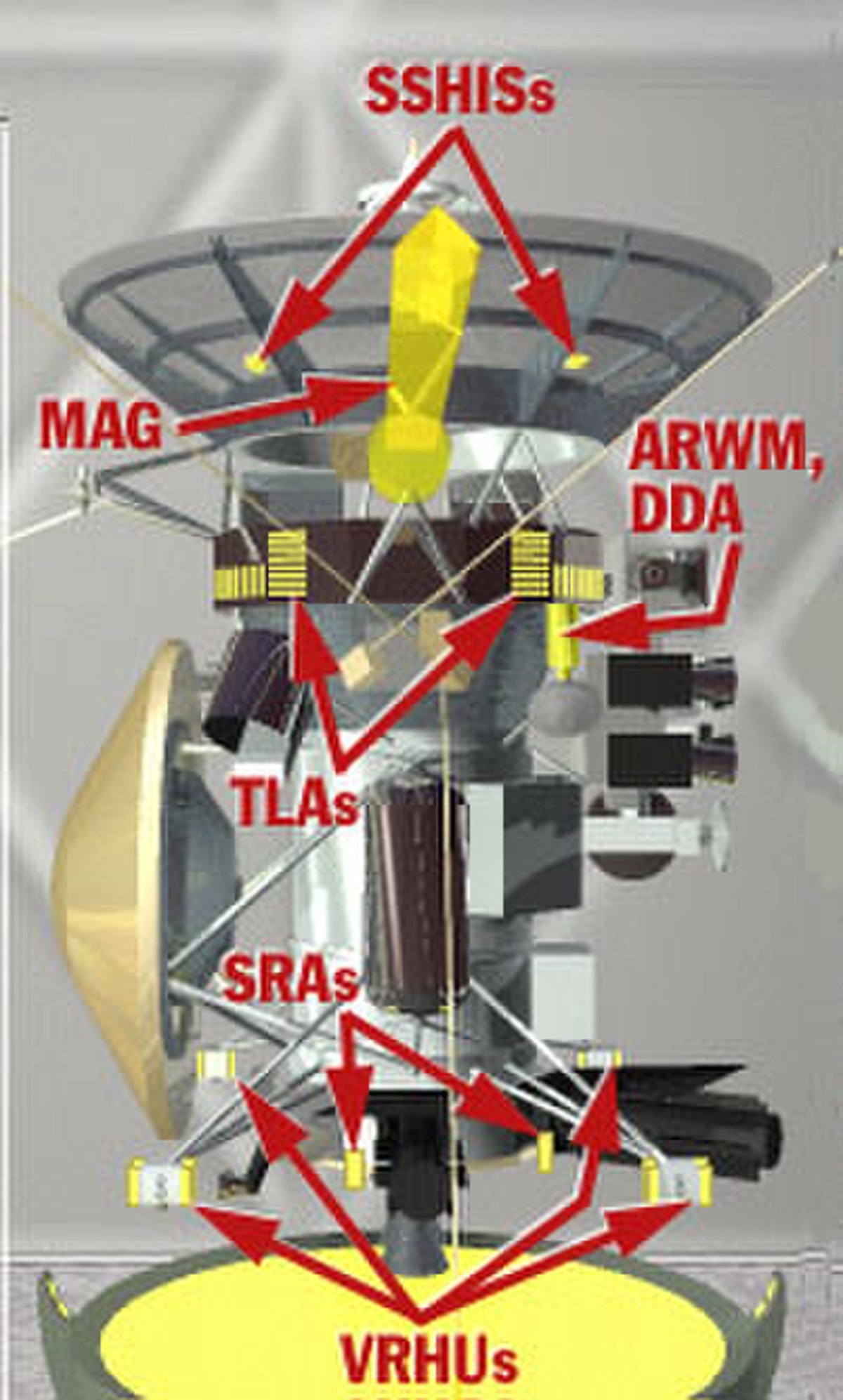
- Sous-système de contrôle de l'orientation et de l'articulation (Attitude and articulation control subsystem - AACS) : Le rôle de ce système est triple. Le premier est de définir l'orientation de la sonde selon les trois axes. Le second est de définir l'articulation de la sonde et le troisième de définir la direction vers laquelle doit pointer le moteur principal. Dans ce but, ce système est équipé de trois unités gyroscopiques, fabriqués par Hughes Aircraft Company, d'une unité à référence stellaire, capable de repérer et de se positionner par rapport à 5000 étoiles, et d'un dispositif de pointage permettant de diriger le moteur principal, monté sur trois roues octogonales, permettant de diriger le moteur sur les trois axes.
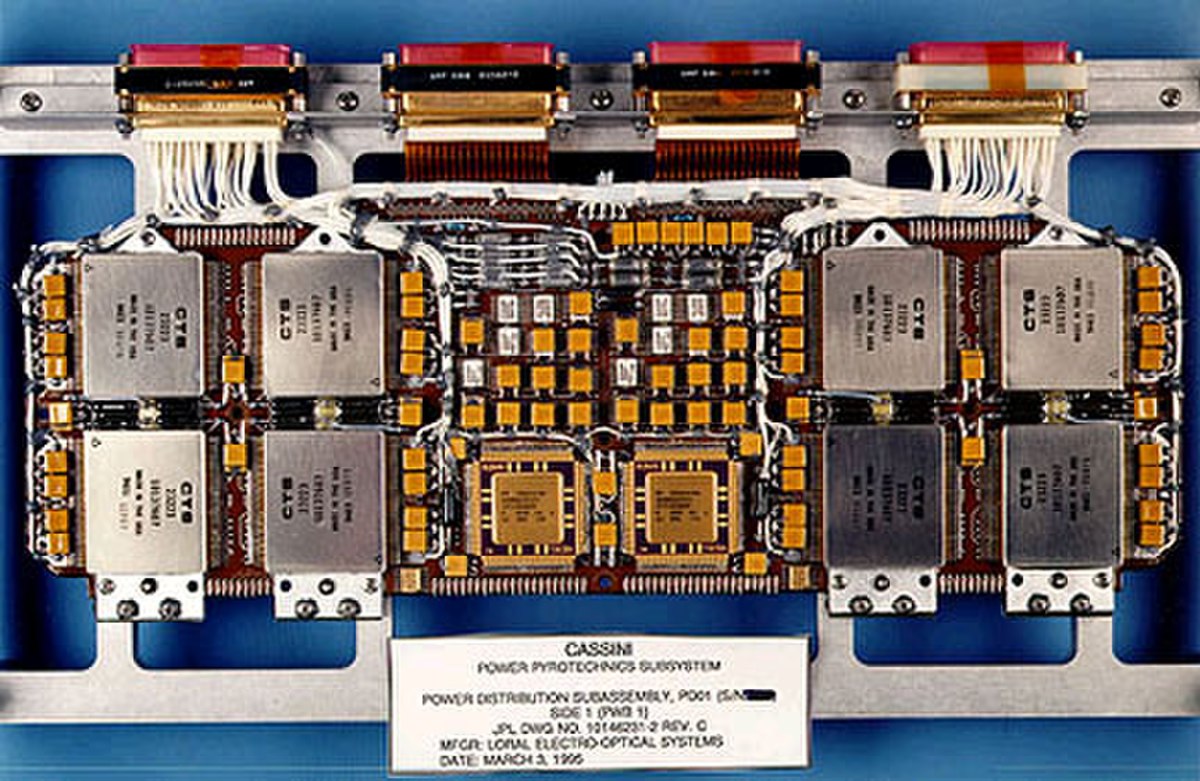

- Sous-système puissance et pyrotechnique (Power and pyrotechnique subsystem - PPS) : Ce système fournit l'énergie électrique et gère les évènements pyrotechniques, notamment ceux nécessaires lors du lancement de la sonde par le véhicule de lancement Centaur. L'électricité est produite par trois générateurs thermoélectriques à radioisotopes (RTG - voir plus loin la controverse à leur sujet) et est ensuite acheminée vers les autres systèmes.
- Sous-système radiofréquence (Radio frequency subsystem - RFS) : Ce système, conjointement avec le sous-système antenne, gère les télécommunications avec la base terrestre. Certains éléments sont également utilisés par les instruments scientifiques radios. La sonde communique avec la Terre sur la bande X, à 8,4 GHz. Le système module les données provenant du CDS, les amplifie à 20 watts et les transfère aux antennes.

- Sous-système antenne (Antenna subsystem - ATM) : Ce système est composé d'une antenne à haut gain (HGA) et de deux antennes à bas gain (LGA). La fonction primaire de l'antenne à haut gain est d'assurer la communication avec la Terre, mais aussi la communication avec le module Huygens sur bande S lors de son atterrissage et le fonctionnement du radar sur bande Ku et des instruments radios sur bande Ka. L'antenne à haut gain est composé d'un réflecteur parabolique de 4 mètres de diamètre, d'un sous-réfracteur monté à son point focal et de 6 branches reliant les deux. Afin de protéger les instruments scientifiques de la sonde des rayons du Soleil, la parabole était dirigée au début de la mission vers le Soleil, afin d'agir comme une ombrelle.
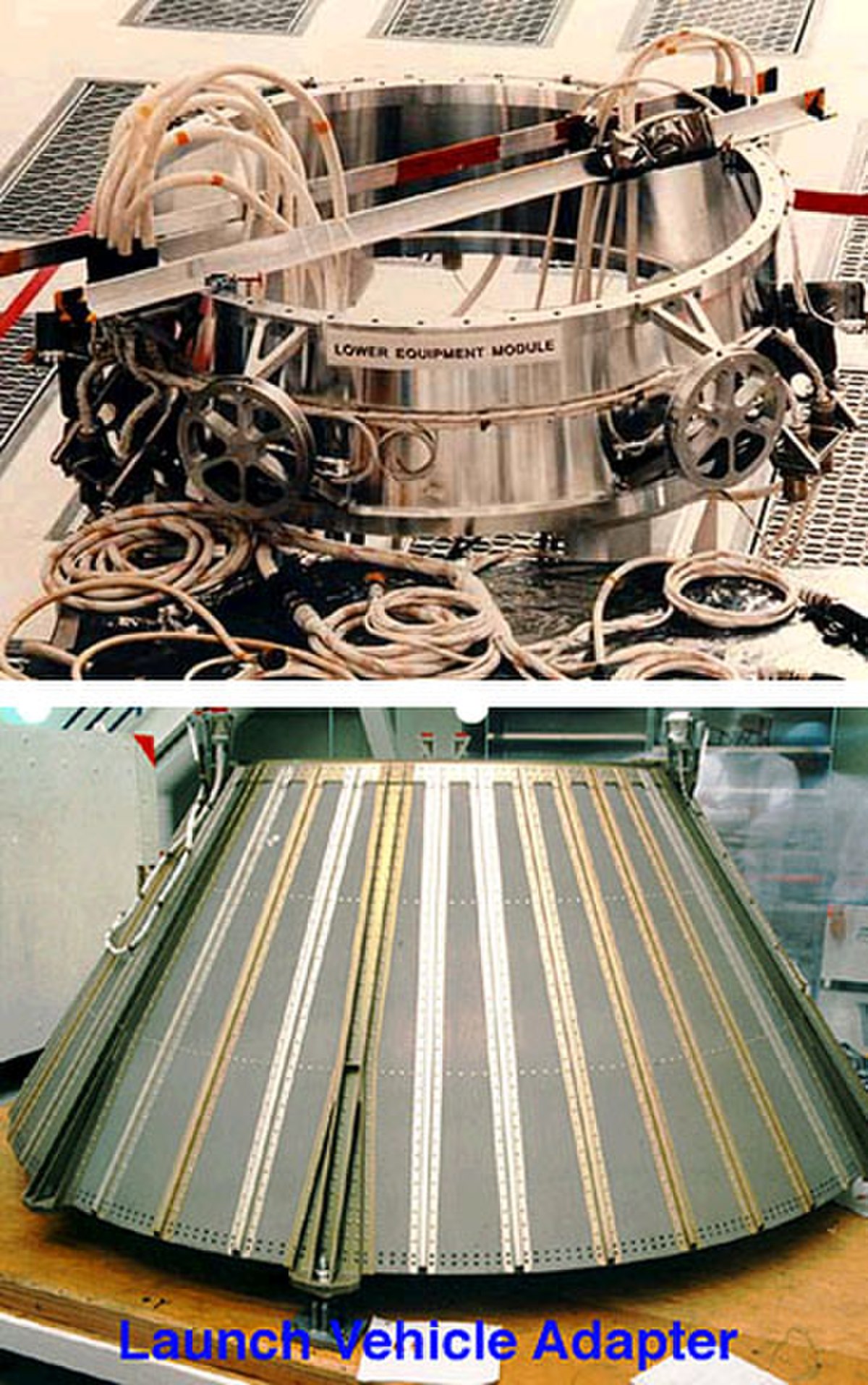
- Sous-système structure (Structure subsystem) : En plus de ses fonctions de squelette de la sonde, ce système sert à la conduction thermique au sein de la sonde, afin de répartir l'énergie et comme masse électrique. Il protège également les autres éléments de la sonde contre les radiations et les micrométéorites. En outre, il est équipé de points d'ancrage qui ont servi pour la manutention au sol.
- Sous-système dispositif mécanique (Mechanical device subsystem - DEV) : Ce système comprend un certain nombre de dispositifs mécaniques non-asservis, comme le dispositif de séparation avec le véhicule Centaur, le déploiement du bras du magnétomètre ou les déclencheurs des dispositifs pyrotechniques.
- Sous-système paquetage électronique (Electronic package subsystem) : Ce système, qui comprend les différents éléments électroniques de la sonde, est composé d'un bus circulaire composé de 12 baies contenant les modules électroniques. Ces baies sont conçues de manière à protéger les modules des radiations, des champs magnétiques, et à respecter les nécessités de centre de gravité et de liaison.

- Sous-système câblage (Cable subsystem) : Ce système permet la liaison électrique de tous les autres sous-systèmes, que ce soit pour l'alimentation ou la transmission de données. Ce système est passif et ne contient pas de dispositif électronique. Sa fonction est de transférer un signal électrique sans l'altérer.
- Sous-système contrôle de température (Temperature control subsystem - TEMP) : Ce système a pour but de maintenir la température de la sonde dans des limites acceptables. Quand la sonde a survolé Vénus, la température était jusqu'à trois fois supérieure à celle lors de sa présence dans l'orbite terrestre, alors que dans l'orbite de Saturne, elle est jusqu'à 100 fois inférieure. La température est maintenue à l'aide de dispositifs spécialisés, mais aussi grâce à des astuces simples, comme l'effet d'ombrelle obtenu en orientant l'antenne à haut gain face au Soleil.

















































