Degré de liberté (mécanique) - Définition
La liste des auteurs de cet article est disponible ici.
Introduction

Un solide rigide isolé dans l'espace peut se déplacer librement dans un mouvement qu'on peut décomposer suivant 6 transformations géométriques indépendantes (translations et rotations autour d'axes fixes dans les trois directions d'une base liée à notre espace à 3 dimensions). Il en est de même d'un solide isolé par rapport à un autre référent.
Si ces solides sont liés mécaniquement, certains de ces mouvements élémentaires sont impossibles. On appelle degrés de liberté dans une liaison, les mouvements relatifs indépendants d'un solide par rapport à l'autre autorisés par cette liaison.
Pour chaque type de liaison considérée, il résulte une combinaison différente des degrés de liberté, dépendant complètement de la géométrie des contacts de liaison.
Cette notion est largement employée pour l'étude des dispositifs de mise en position de pièces sur les machines outils, l'objectif étant de solidariser complètement la pièce avec la machine avec une dispersion la plus faible possible.
Les degrés de liberté
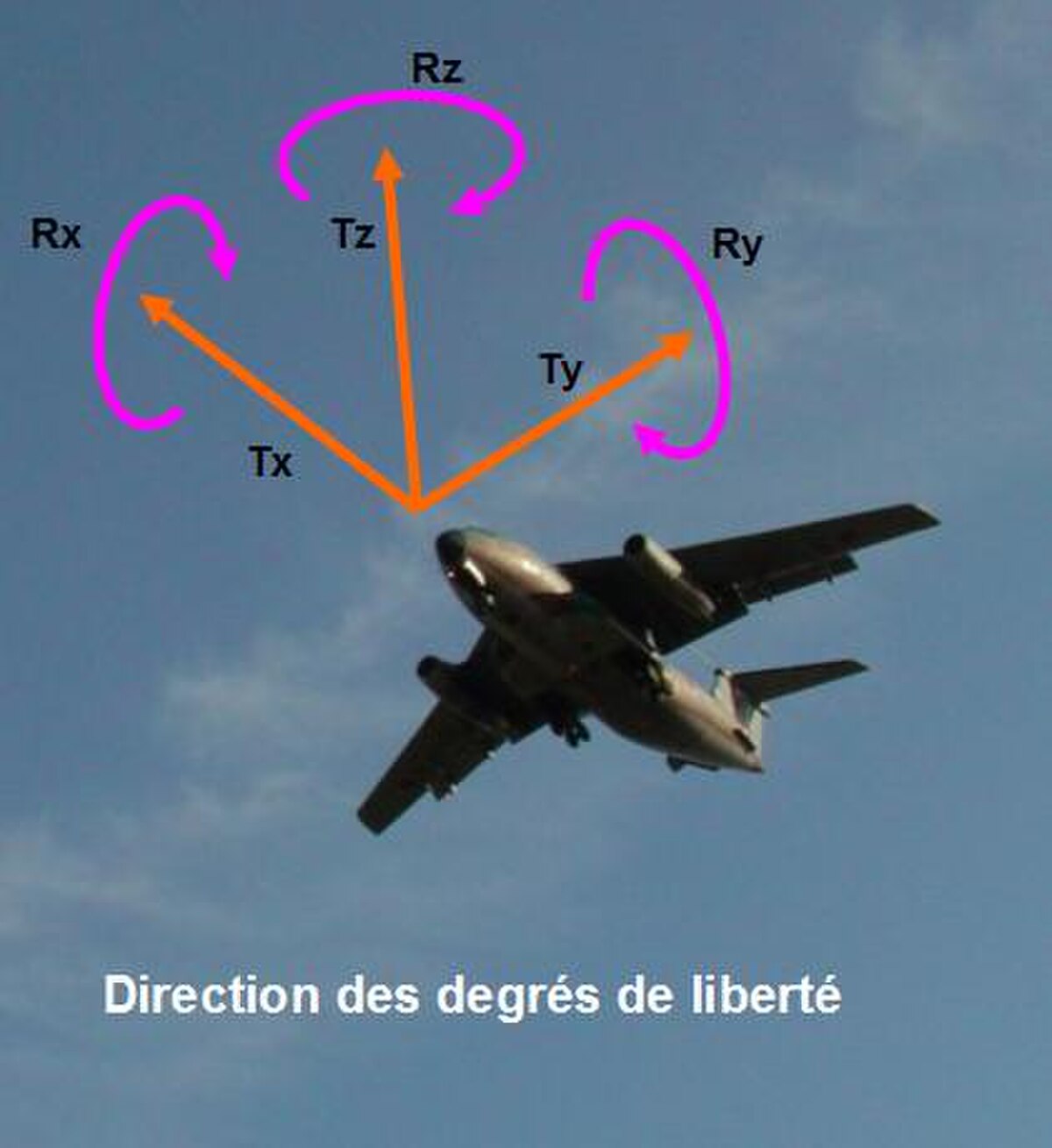
Les 6 mouvements considérés sont trois translation et trois rotations de directions indépendantes (constituant une base vectorielle).
Si on s'oriente dans l'espace à l'aide d'un repère orthonormé (O,x,y,z) les six degrés de liberté s'expriment ainsi :
| Degré | axe sur machine outil | mouvement pour un véhicule |
|---|---|---|
| Tx | Longitudinal | avance |
| Ty | transversal | dérive |
| Tz | vertical | ascension |
| Rx | - | roulis |
| Ry | - | tangage |
| Rz | - | lacet |
Dans le cas des machines outils, l'orientation des axes est définie par convention. Les noms des déplacements d'un avion ou d'un bateau correspondent si on considère un repère orienté comme sur l'image, c'est-à-dire X dans la direction de progression, et Z à la verticale.
Matrice des degrés de liberté
La présentation des degrés de liberté prend souvent la forme d'un tableau (ou matrice) donnant par colonne un type de mouvement (translation ou rotation) et par ligne la direction considérée (x, y ou z). Cette notation autorise des comparaisons rapides avec les torseurs d'action mécanique transmissible dans une liaison, ou le torseur cinématique de la même liaison. Cependant, l'absence de point de référence ne permet pas d'interchanger l'un et l'autre.
Cette matrice est plus souvent associée à une liaison mécanique qu'à un solide, c'est-à-dire à un solide vu par un autre solide référant. Et ce n'est que dans ce contexte que le rapprochement avec les torseurs pourra être fait sans trop d'erreurs.
Matrice des degrés de liberté :

Lorsqu'un degré de liberté est supprimé, on remplace son mnémonique par O (zéro).
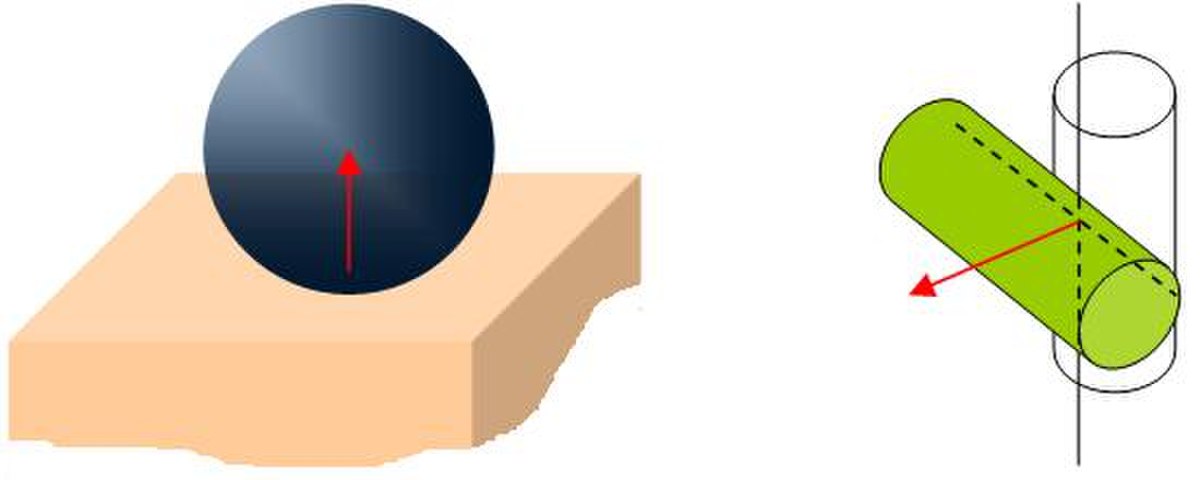
Dans l'exemple d'une liaison ponctuelle, on définit le repère local associé à la liaison: le point de contact A est centre du repère; le vecteur



- Liaison ponctuelle en A suivant X

Degrés de liberté et degrés de liaison
En réalité, il est plus intéressant de considérer les degrés de liberté supprimés plutôt que ceux autorisés. On appelle degré de liaison tout degré de liberté supprimé. Il correspond à une direction d'effort transmissible. Ainsi une liaison complète, qui solidarise deux pièces, est celle interdisant tout mouvement, alors que la liaison nulle n'a aucun effet.
Le nombre de degrés de liaison est donc le complément (à 6) du nombre de degrés de liberté. La liaison ponctuelle, génératrice de toutes les autres possède donc 1 degré de liaison.
Lors de la conception d'un mécanisme, le choix d'une liaison peut se faire sur les degrés de liaison (aspect transmission), sur les degrés de liberté (aspect guidage) ou sur les deux à la fois. Le choix sera en plus motivé par des conditions d'hyperstatisme et donc de coût lié à la précision requise.
Par exemple le piston d'un moteur à explosion, doit pouvoir translater librement le long de son axe: une liaison glissière, pivot glissant ou linéaire annulaire avec le bloc moteur sera satisfaisante (cinématiquement). De même une porte à 2 deux gonds est plus facile à remettre en place qu'une disposant de trois gonds. Cela provient du fait que les axes des (3) gonds ne peuvent pas être parfaitement alignés.
Torseurs associés à la liaison
En mécanique du solide, le comportement statique et cinématique d'une liaison peut être modélisé par l'outil mathématique torseur.
En général, pour les mouvements cinématiquement admissibles, la puissance des efforts de liaison sont non nuls (d'où l'apparition d'échauffements). La liaison est dite parfaite si la puissance des efforts de liaison est nulle pour tous les mouvements cinématiquement admissibles. Il s'agit d'une modélisation idéale qui dans la réalité est plus ou moins réalisée.
Dans tout ce qui suit, les liaisons sont supposées parfaites.
- Le torseur d'action transmissible.
Lorsque deux pièces sont liées, certains mouvements relatifs sont interdits. Il en résulte l'existence d'efforts dans ces directions. Ces efforts sont dits transmissibles dans la liaison. Leur valeur ne dépend en fait que des autres actions extérieures aux deux pièces considérées.
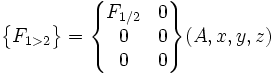
Dans le cas de la liaison ponctuelle, par exemple en tout point de la normale de contact (pas seulement au point de contact A) suivant X, le contact maintenu permet l'application d'une force dont la direction est normale au contact. Le torseur d'action mécanique du solide 1 sur le solide 2, exprimé en ce point et dans la même base (
 à comparer avec
à comparer avec

Ce qui signifie que seule une force dans la direction du degré de liberté supprimé peut être transmise. Lorsque le point est bien choisi, la matrice des degrés de liberté est généralement complémentaire de la forme du torseur d'effort transmissible dans la liaison parfaite (il existe de notables exceptions, comme le système vis-écrou). Si on change de point de réduction du torseur, cela n'est peut-être plus vrai.
- Le torseur cinématiquement admissible.
Les deux pièces en liaison peuvent bouger suivant les degrés de liberté (seules directions admissibles). Le champ admissible des vitesses du solide 1 par rapport au solide 2, s'exprime alors par un torseur cinématique de la forme:


Les ωi représentent les taux de rotation autour des axes x, y et z, ou les composantes du vecteur taux de rotation de 1 par rapport à 2. Les vi sont les composantes de la vitesse (vecteur) du point A considéré appartenant à 1 mobile par rapport à 2. Ce torseur inverse les colonnes (translation et rotation); les vecteurs vitesse constituent en effet les moments (situés alors à droite) du torseur cinématique alors que le taux de rotation en est la résultante. Il faut donc le comparer à la matrice des degrés de liberté après avoir opéré une symétrie verticale. Là aussi, le choix du point de réduction est important.
- Dualité entre les torseurs statique et cinématique
La dualité entre le torseur d'effort transmissible dans une liaison et le torseur cinématique admissible de la liaison provient du fait que si elle est parfaite, la puissance des inter-efforts est nulle. Cette puissance se calcule par le co-moment des torseurs, qui n'est autre que la somme des produits des termes des deux torseurs relatif à un même degré.

soit en développant:

Les degrés de liberté étant indépendants par définition, cette somme ne s'annule que si chaque terme est nul. Donc lorsque le degré de liberté existe (V non nulle) l'effort correspondant est nul, et réciproquement. Ce qui explique qu'on peut généralement s'appuyer sur la matrice des degrés de liberté pour vérifier la forme préalable de ces torseurs.
Enfin un calcul d'équilibre ou de déplacement conduira certainement à l'annulation de certains termes (effort effectivement transmis ou mouvement réellement suivi). Ce qui ne remet pas en cause la forme initiale des torseurs ou de la matrice des degrés de liberté.

















































