Projection (géométrie) - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
En géométrie, une projection est une transformation de l'espace, c'est-à-dire une application linéaire qui projette l'espace sur une sous partie. Par exemple pour faire de la 3D on projette l'espace (en 3D) sur l'écran (en 2D), on obtient ainsi un rendu similaire à celui que l'on aurait eu en regardant la même scène avec ses propres yeux.
Projection en géométrie plane
En géométrie plane, on considère une droite D du plan et une direction Δ non parallèle à D. Soit un point A du plan, alors la projection de A sur D selon Δ est le point A' = P(A) tel que :
- Si A est sur D, alors A = A' ;
- sinon :
- A' est situé sur D ;
- la droite (AA' ) est parallèle à Δ.
En géométrie euclidienne, on fait fréquemment usage d'un cas particulier de projection linéaire, la projection orthogonale : c'est le cas particulier où Δ est perpendiculaire à D. Dans ce cas-là, si A est hors de D, alors (AA') est perpendiculaire à D.
La projection est une application linéaire. Cela signifie que si A, B et C sont trois points alignés et si A', B' et C' sont leurs projetés, alors

(on oriente les droites) ou encore

et si k est un scalaire, alors
- .
Projections et coordonnées cartésiennes
Les droites D et Δ se coupent en O. Alors, soient A' le projeté de A sur D parallèlement à Δ, et A'' le projeté de A sur Δ parralèllement à D. On voit que


Projection et trigonométrie
Considérons une projection orthogonale sur D. Soient deux point A et B, et soit α l'angle


Projection parallèlement à une droite en géométrie analytique
Soit

- a·x + b·y + c = 0
l'équation de D. Soit le point A de coordonnées (xA , yA ) et son projeté A' de coordonnées (xA' , yA' ).
Comme (AA' ) est parallèle à Δ, il existe un scalaire k tel que

soit

Par ailleurs, A' est sur D, ce qui signifie que
- a·xA' + b·yA' + c = 0
on obtient donc
- a·(k·xu + xA ) + b·(k·yu + yA ) + c = 0
d'où

(a·xu + b·yu est non nul puisque

soit

Dans le cas d'une projection orthogonale, et si le repère est orthonormé, alors on peut choisir

ce qui donne

on peut alors vérifier que si l'on prend la projection orthogonale sur l'axe Ox (qui a pour équation y = 0 soit a = c = 0 et b = 1), on a bien xA' = xA et yA' = 0.
Si l'on décide arbitrairement que D contient l'origine (c = 0) et que a² + b² = 1, on obtient alors

Définition générale
En algèbre linéaire une projection est une application naturellement associée à une décomposition de l'espace sous forme de deux sous-espaces supplémentaires. À un vecteur de l'espace, elle associe l'un des deux éléments de sa décomposition sur ces deux espaces.
Voir l'article détaillé Projecteur (mathématiques).
À ce titre, la projection centrale n'est pas un projecteur.
Projection en géométrie dans l'espace
Projection sur un plan parallèlement à une droite
Considérons un plan Π et une droite Δ. Soit A un point de l'espace. La projection P sur Π parallèlement à Δ est définie par :
- P(A) est sur Π ;
- si A est sur Π, alors P(A) = A ;
- sinon, la droite (A, P(A)) est parallèle à Δ.
Si Δ est perpendiculaire à Π, alors la projection est dite orthogonale.
La projection est une application linéaire, on retrouve donc des propriétés de la projection en géométrie plane : si A, B et C sont trois points alignés et si A', B' et C' sont leurs projetés, alors
(on oriente les droites) ou encore
et si k est un scalaire, alors
- .
Projection sur un plan parallèlement à une droite en géométrie analytique
Soit
- a·x + b·y + c·z + d = 0
l'équation de Π. Soit le point A de coordonnées (xA , yA , zA ) et son projeté A' de coordonnées (xA' , yA' , zA' ).
Comme (AA' ) est parallèle à Δ, il existe un scalaire k tel que
soit

Par ailleurs, A' est sur Π, ce qui signifie que
- a·xA' + b·yA' + c·zA' + d = 0
On voit que d'un point de vue analytique, le problème est très similaire au précédent. On a un système de quatre équations à quatre inconnues xA' , yA' , zA' et k. On obtient :

Dans le cas d'une projection orthogonale et si le repère est orthonormal, on peut choisir xu = a, yu = b et zu = c, soit

Si l'on décide arbitrairement que Π contient l'origine (d = 0) et que a² + b² + c² = 1, alors on a

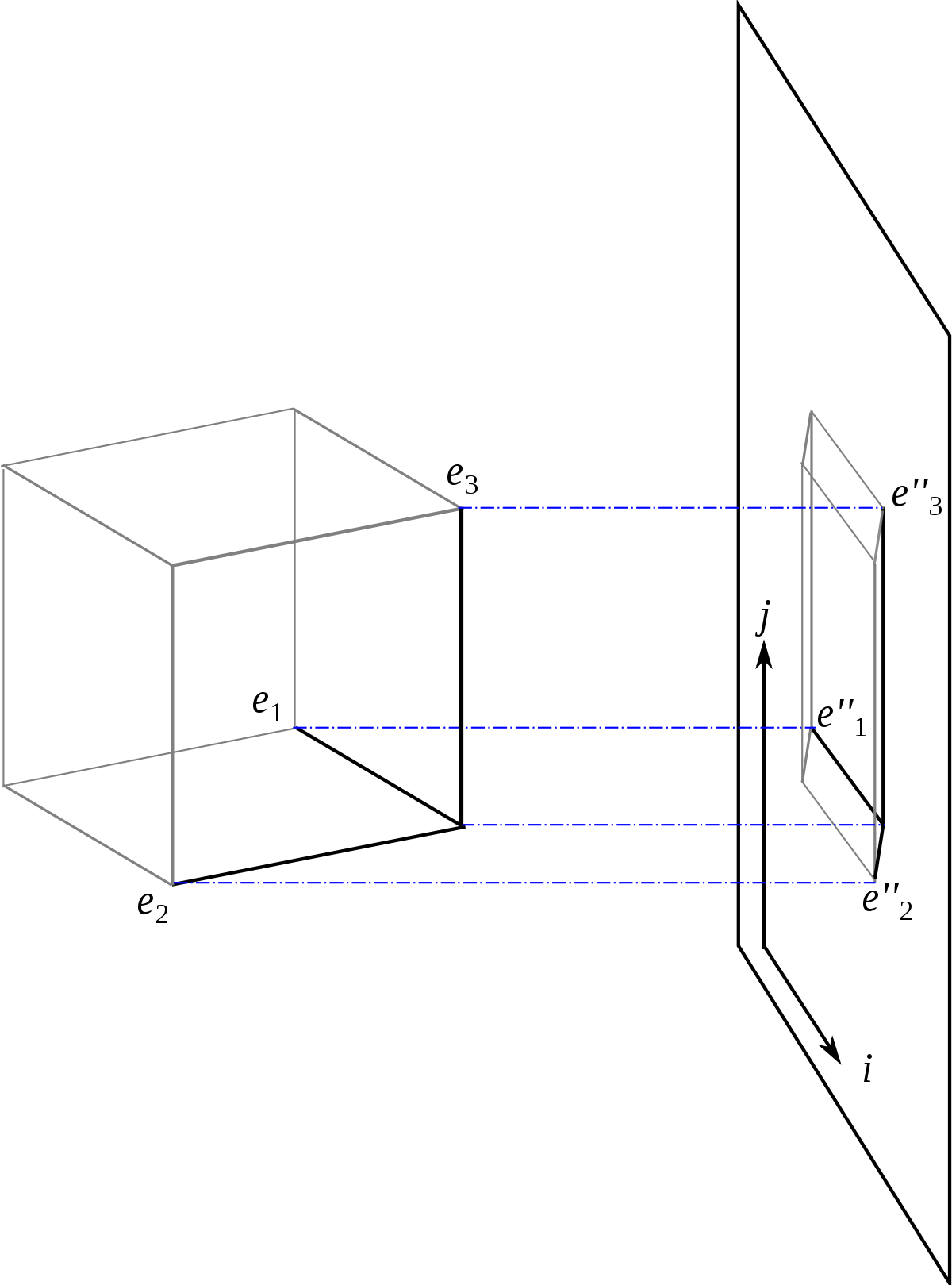
Dans le cas de la perspective isométrique, on choisit |a| = |b| = |c| = 1/√3. Par exemple, si on choisit les trois valeurs positives, on a

Projection sur une droite parallèlement à un plan
Avec les mêmes notations que ci-dessus, on peut définir la projection Q sur Δ parallèlement à Π :
- Q(A) est sur Δ ;
- si A est sur Δ, alors Q(A) = A ;
- sinon, la droite (A, Q(A)) est coplanaire à Π.
Si Δ est perpendiculaire à Π, alors la projection est dite orthogonale.
C'est toujours une applicaiton linéaire, elle a donc les propriétés énoncées ci-dessus.
Projections et coordonnées cartésiennes
Considérons trois droites D1, D2 et D3, non coplanaires et concourante en un point O. Elles sont normées et orientées.
Pour un point de l'espace A, on appelle :
- A1 le projetté de A sur D1 parallèlement au plan (D2, D3) ;
- A2 le projetté de A sur D2 parallèlement au plan (D3, D1) ;
- A3 le projetté de A sur D3 parallèlement au plan (D1, D2).
Alors, (O,D1, D2, D3) forme un repère et

Projection centrale
En géométrie projective, on considère des projections centrales. Elles décrivent ce qui arrive aux positions observées de différents objets quand l'œil de l'observateur change de place. Les transformations projectives en sont la généralisation.

















































