Courbure - Définition
La liste des auteurs de cet article est disponible ici.
Courbure d'une surface de R3
Pour disposer de versions algébrisées de toutes les notions de courbure introduites, il convient de considérer une surface orientée.
Courbures principales
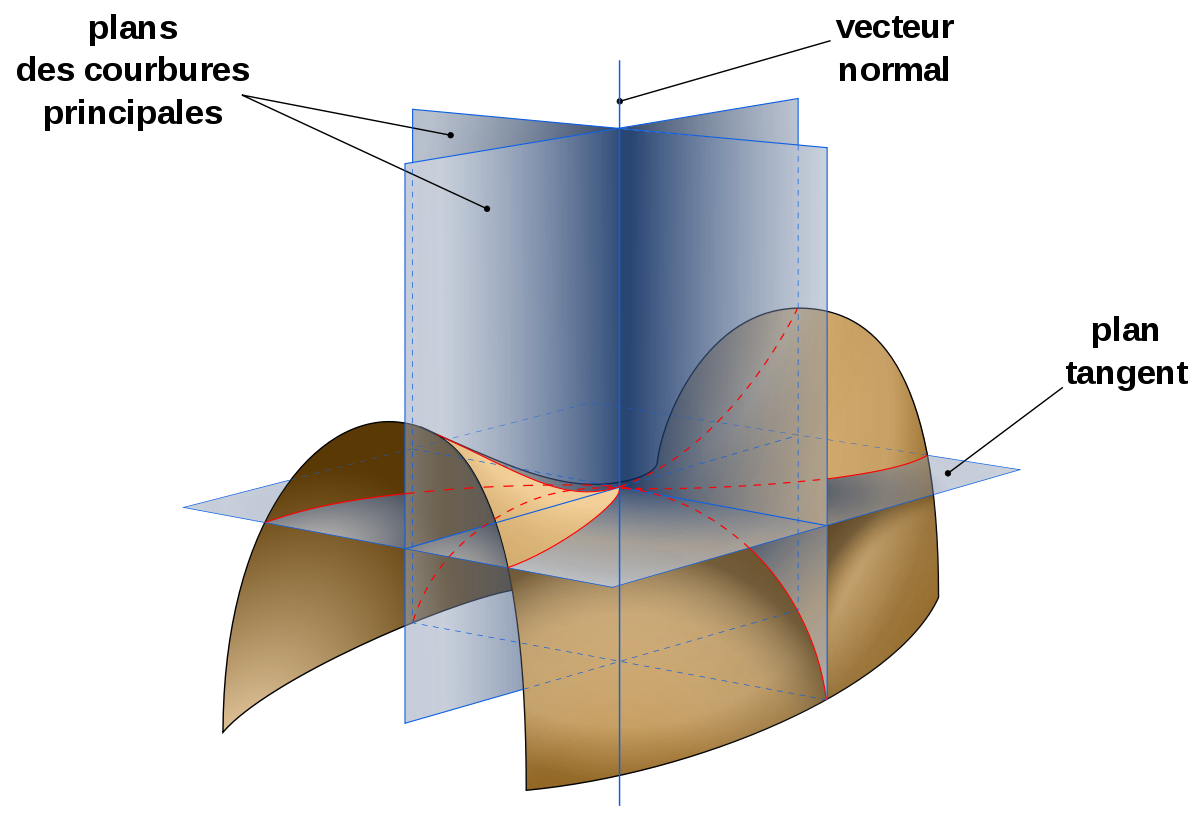
En un point M de la surface, on considère un plan tournant, perpendiculaire en M au plan tangent à la surface. Ce plan intersecte la surface considérée en une courbe. À chacune des courbes ainsi construite est associée sa courbure en M.
Les valeurs minimum et maximum de la courbure portent le nom de courbures principales. En général, elles sont différentes et, dans ce cas, les plans correspondant aux deux courbures principales sont perpendiculaires entre eux. Leur intersection avec le plan tangent définit les directions principales.
Courbures principales et directions principales sont respectivement les valeurs propres et vecteurs propres d'un endomorphisme symétrique du plan tangent. Ce dernier, l'endomorphisme de Weingarten, s'obtient à partir de la différentielle de l'application de Gauss.
Courbure moyenne
On appelle courbure moyenne


Il s'agit de la trace de l'endomorphisme de Weingarten.
Courbure de Gauss
On appelle courbure de Gauss

Il s'agit du déterminant de l'endomorphisme de Weingarten.
Courbure totale
La courbure totale d'une surface orientée S de l'espace est l'intégrale de la courbure de Gauss sur la surface. Elle s'interprète également comme l'aire (algébrique) balayée par le vecteur normal unitaire sur la sphère unité.
Définition de la courbure d'un arc plan
La courbure est définie comme la norme du vecteur accélération d'un mobile parcourant une courbe à vitesse constante égale à 1. En d'autres termes, c'est la dérivée seconde par rapport à l'abscisse curviligne de la position du mobile.
En pratique si on considère une courbe paramétrée




Le problème revient donc à calculer

On peut également écrire cette formule ainsi:

où



Calcul explicite
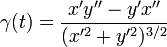
Pour une courbe plane en coordonnées paramétriques dans un repère orthonormé

-

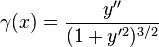
Dans le cas où la courbe est paramétrée par l'abscisse cartésienne

-

Lorsque l'équation de la courbe est exprimée en coordonnées polaires,

-
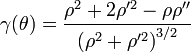

dans laquelle la dérivée est prise par rapport à

Courbure d'une variété riemanienne
En géométrie riemannienne, la courbure est un tenseur introduit à partir de la notion de connexion. Cet objet s'est dégagé comme le plus pertinent, mais il peut être difficile à appréhender en raison du formalisme nécessaire à son introduction. La courbure sectionnelle d'une variété riemannienne, d'abord plus simple, véhicule autant d'information que le tenseur de courbure, et permet de faire le lien avec la courbure de Gauss.
Courbure sectionnelle
On définit une courbure sectionnelle pour chacun des 2-plans inclus dans chacun des espaces tangents d'une variété riemannienne. Si P est un tel plan en un point m, on considère en premier lieu la famille des géodésiques issues de m selon les vecteurs de P. Cette famille constitue une surface paramétrée incluse dans la variété, image du 2-plan par l'application exponentielle.
La courbure sectionnelle du 2-plan est alors la courbure de Gauss de cette surface. Formellement, la collection de toutes les courbures sectionnelles constitue une application sur la grassmannienne des 2-plans, à valeurs réelles.
Définition du tenseur de courbure
Soit une variété affine M de dimension n, c'est-à-dire une variété munie d'une connexion affine


![\mathcal{R}(X,Y)Z \ = \ \nabla_X\nabla_Y Z \ - \ \nabla_Y\nabla_X Z \ - \ \nabla_{[X,Y]}Z](https://static.techno-science.net/illustrationWebp/Definitions/autres/e/ec5e05bbf196c9ce3c27084a2c91921f_7cc3c681b12b2b5a373f0f0309bbb2f5.png)
|
où [X, Y] est le crochet de Lie de X et Y.

Introduction d'une métrique
On munit la variété affine M d'un tenseur métrique g : (M,g) est alors une variété riemannienne, et on peut définir une courbure à valeurs réelles par :

|
En composantes dans une base locale



|
où les


|
En prenant sa trace (par rapport à X et Y), on obtient le tenseur de courbure de Ricci, et en prenant la trace de celui-ci, on obtient la courbure scalaire (qui est une fonction de M dans

Courbure de Ricci
Courbure scalaire
Exemples
- Pour l'espace euclidien, la courbure scalaire est nulle.
- Pour la sphère de dimension n rayon un, la courbure scalaire vaut n(n − 1).

















































