Représentations du groupe symétrique d'indice trois - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
En mathématiques les représentations du groupe symétrique d'indice trois noté S3 sont un exemple simple d'application de la théorie des représentations d'un groupe fini.
Sur un corps de caractéristique nulle et contenant toutes les racines sixièmes de l'unité, il existe trois représentations irréductibles du groupe symétrique d'indice trois, la représentation triviale, celle correspondant à la signature et une d'ordre deux correspondant aux isométries linéaires laissant invariant un triangle équilatéral.
L'analyse des représentations de S3 est une illustration des concepts comme le théorème de Maschke, le caractère, la représentation régulière, les représentations induites et la réciprocité de Frobenius. Les constructions des différentes représentations sont ici réalisées manuellement, ce que permet la petitesse de l'ordre du groupe.
Représentations du groupe S3
Représentation régulière
Le groupe est d'ordre suffisamment limité pour permettre une représentation matricielle exhaustive de la représentation régulière. Si cette méthode est trop lourde pour être envisagé ne serait-ce que pour S4, elle est ici praticable.
Le groupe S3 contient six éléments et trois classes de conjugaison, la première ne contient que l'identité noté 1, la deuxième les transpositions t1 = (23), t2 = (13) et t3 = (12) et la troisième les deux cycles d'ordre trois c1 = (123) et c2 = (132). Si V est l'espace vectoriel de la représentation régulière, alors (1, c1, c2, t1, t2, t3) est la base canonique de la représentation, à l'ordre près.
Soit ρ le morphisme de groupe de S3 dans le groupe général linéaire GL(V) de V. Soit x et y deux éléments de G et donc de la base de V. Par définition de la représentation régulière, ρx(y) = xy. On en déduit les matrices Mx de la représentation :






On remarque l'existence de deux vecteurs propres pour toutes les images de ρ :

Toute permutation laisse f1 invariant, toute permutation paire laisse f2 invariant et toute permutation impaire transforme f2 en -f2. On obtient ainsi deux représentations de degré un, l'une t est la représentation triviale, associant un à chaque élément de S3, l'autre σ associe la signature. Ces représentations sont de degré un donc irréductibles.
|
Théorème de Maschke
Recherchons les autres représentations, le théorème de Maschke indique qu'elles sont toutes sommes directes de représentations irréductibles, il suffit donc de connaître toutes les représentations irréductibles.
Tout sous-espace vectoriel stable pour la représentation possède un supplémentaire stable pour cette représentation, le théorème de Maschke indique une méthode pour le trouver. Soit F l'espace vectoriel engendré par f1 et f2 et p le projecteur sur F parallèlement à l'espace engendré par c1, c2, t1, t2, alors le projecteur p0 défini par l'égalité suivante possède un noyau stable par toutes les images de ρ.

Dans la base canonique, on obtient les matrices P et P0 des deux projecteurs :

Notons G le noyau de p0. Le projecteur p0 est composé de deux matrices bloc égales, c'est la matrice du projecteur dont le noyau est composé des vecteurs colonnes de somme nulle. Notons G le noyau de p0. Si j désigne la racine cubique de l'unité, alors on obtient la base suivante de G

Considérons alors la représentation (G, φ) la représentation où φ est la restriction de ρ à G. Si Gx est la matrice de φx dans la base (gi) pour x élément de S3, on obtient :


On remarque alors que l'espace vectoriel H engendré par g1 et g3 est un sous-espace stable par φ, il possède le supplémentaire engendré par g2 et g4 aussi stable et dont la représentation est isomorphe à celle de H. Soit θ la restriction de φ à H, (H, θ) est une représentation de degré deux, elle est présente deux fois dans la représentation ρ. Cette représentation est irréductible car sinon ρ serait une représentation de matrices diagonales et son ensemble d'arrivé serait un groupe abélien, ce qui est impossible car ce groupe est isomorphe à S3 qui ne l'est pas.
Considérons la base de H composée des deux vecteurs suivants h1 = g1 + g3 et h1 = i.(g1 - g3) où i désigne un complexe imaginaire de carré égal à -1. Soit Hx la matrice de θx dans cette base. On a alors :


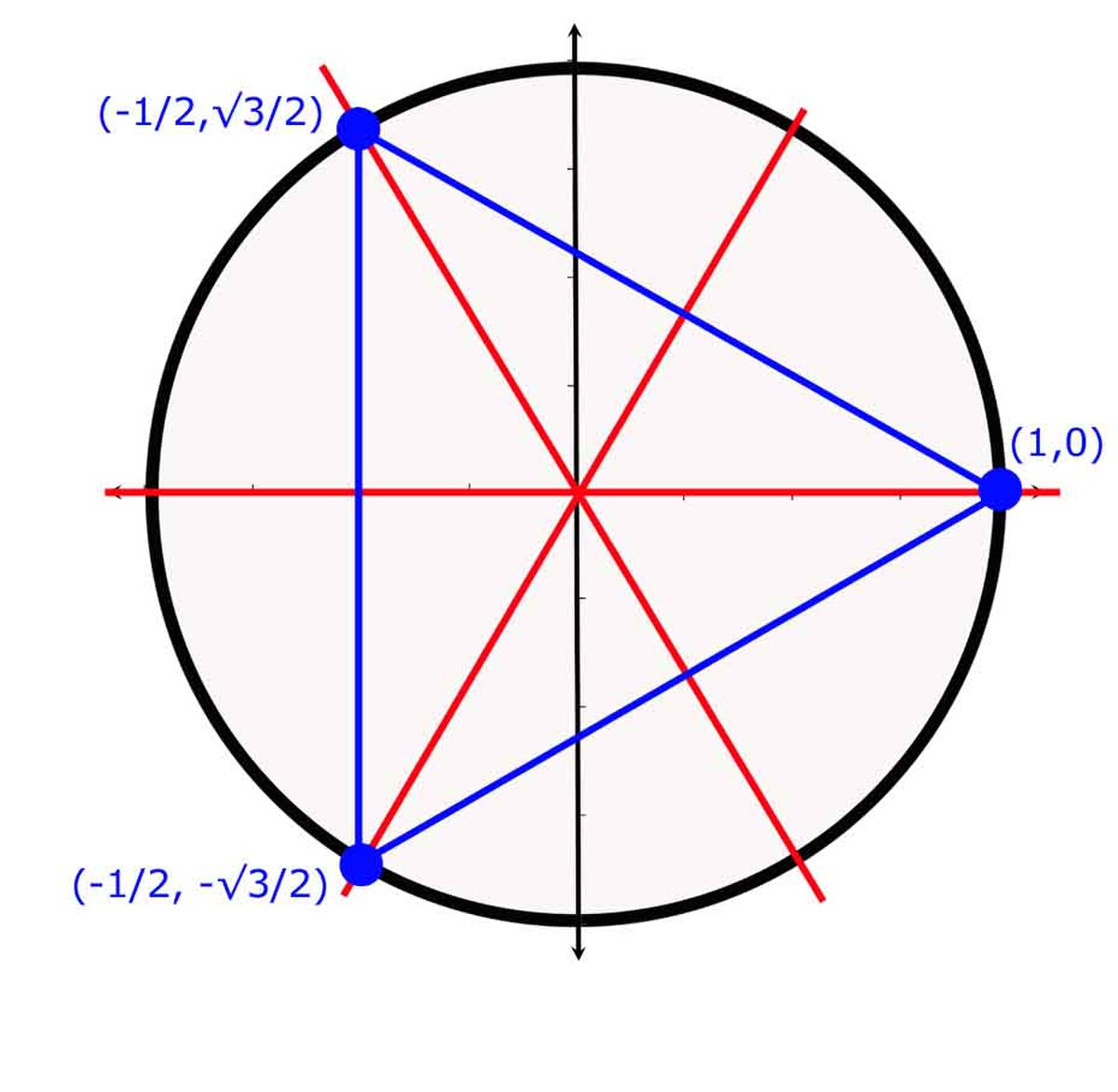
On reconnaît le groupe diédral du triangle représenté sur la figure de droite, les rotations c1 et c2 sont au nombre de deux, elle déplace le point 1 vers j ou j2 si le plan est identifié au plan complexe, les trois symétries, correspondant aux transpositions ont un axe représenté en rouge sur la figure.
En conclusion, la représentation régulière est composée d'une somme directe de quatre représentations : deux de degré un, la représentation triviale et celle associée à la signature, et deux de degré deux, isomorphes et correspondant aux applications linéaires laissant un triangle invariant.
















































