Convexe - Définition
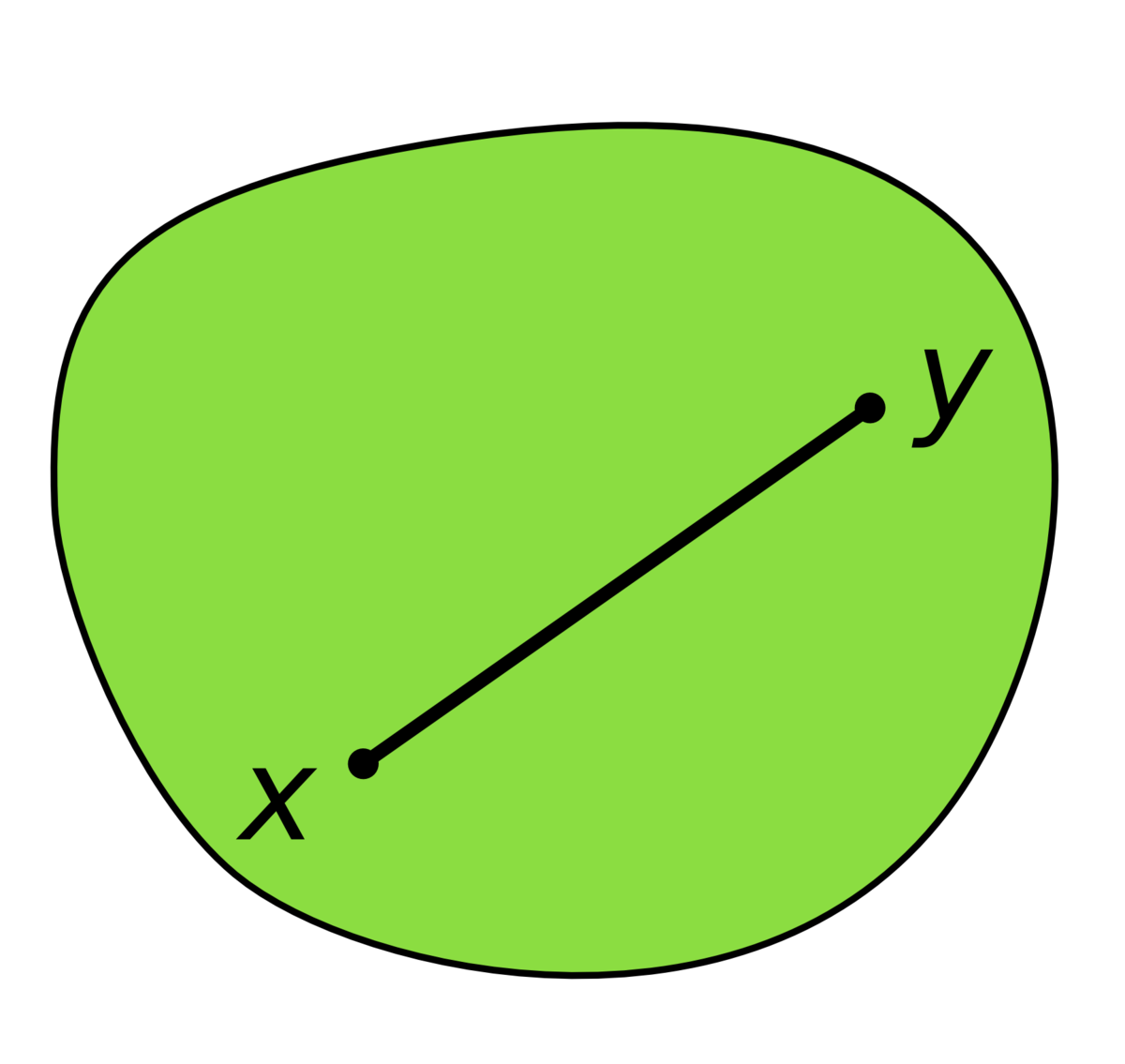
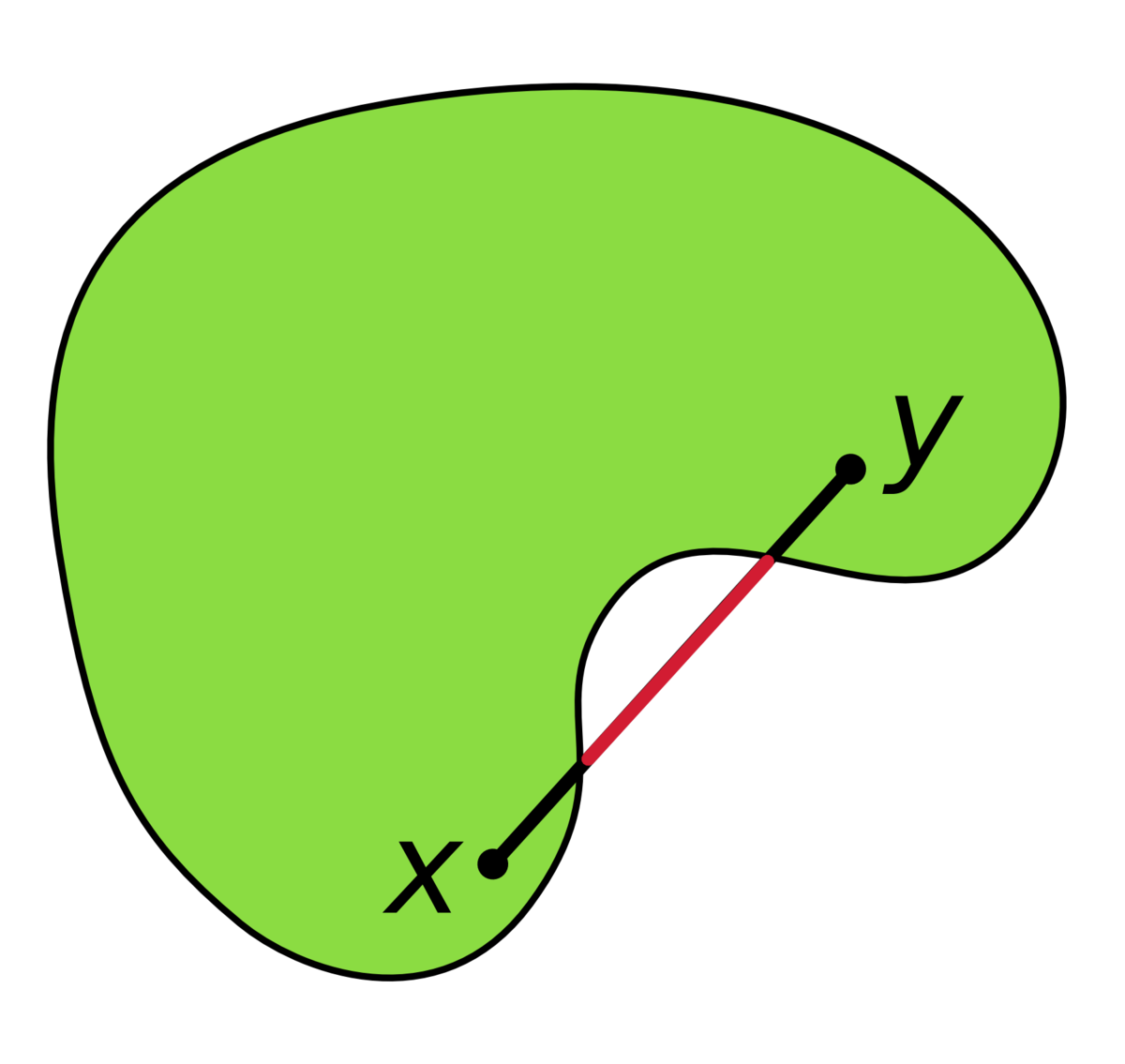
En géométrie, un objet est convexe si pour toute paire de points { A , B } de cet objet, le segment [AB] qui les joint est entièrement contenu dans l'objet. Par exemple, un cube plein, un disque ou une boule sont convexes, mais un objet creux ou bosselé ne l'est pas.
Un objet est concave s'il est le complémentaire d'un objet convexe.
Cette notion concrète a été généralisée dans le cadre des espaces vectoriels et a débouché en analyse sur la notion de fonction convexe.
Le terme convexe est également utilisé :
- en optique. Voir à ce sujet l’article sur les lentilles.
- en finance. Voir à ce sujet l’article sur le gamma et la convexité.
Ensemble convexe
On désigne ici par E un espace vectoriel réel ou complexe. On définit la notion de convexité pour des sous-ensembles de E.
Quels que soient x et y éléments de E, on appelle segment d'extrémités x, y le sous-ensemble de E ainsi défini :
![[x, y] = \{z \in E\, /\, \exists\, t \in [0,\, 1], z = t\, x + (1 - t)\, y\}](https://static.techno-science.net/illustrationWebp/Definitions/autres/f/f11271887f501a3326f58e241c054792_6738d42c97d5fa6e29cecdd69a1353eb.png)
Un sous-ensemble C de E est dit convexe si, pour tout x et y dans C,
![[x,\, y] \subset C](https://static.techno-science.net/illustrationWebp/Definitions/autres/4/45755f3700eab25966f298bd279b0f15_c1f01357470296336cad7fbc8c03c03b.png)
Plus généralement, soit un système



Un sous-ensemble de E est convexe si et seulement s'il est stable par combinaison convexe, c'est-à-dire que toute combinaison convexe de vecteurs de C appartient à C. Cette caractérisation se démontre par récurrence sur le nombre de vecteurs.
Propriétés élémentaires
Une partie convexe est connexe.
L'intersection d'une famille quelconque de sous-ensembles convexes de E est un sous-ensemble convexe de E. Ce n'est pas le cas en général pour une réunion.
Si C est un ensemble convexe, il en est de même de son adhérence et de son intérieur.
Enveloppe convexe
Étant donnée une partie quelconque A de E, il existe au moins un sous-ensemble convexe de E contenant A, à savoir E lui-même ; alors on peut définir l'enveloppe convexe Conv(A) de A : c'est l'intersection de tous les sous-ensembles convexes de E contenant A.
C'est donc le plus petit sous-ensemble convexe de E contenant A, caractérisé par les deux propriétés suivantes :
-


- si C est un sous-ensemble convexe de E contenant A, alors




Si x, y sont deux points de E, l'enveloppe convexe de la paire {x, y} est le segment [x, y].
- L'enveloppe convexe d'un ensemble A est l'ensemble des combinaisons convexes de A.
Démonstration
Soit B l'ensemble des combinaisons convexes de A. Toute combinaison convexe de A appartient à


D'autre part l'ensemble de toutes les combinaisons convexes de A est un convexe (facile) contenant A et donc

Donc

Théorème
- L'enveloppe convexe d'un ensemble A équilibré est équilibrée
Démonstration
Soient



Tout




Alors



Exemples
- Les sous-ensembles convexes de l'ensemble


- Étant donnés n intervalles



- Dans un espace vectoriel (réel ou complexe), tout sous-espace vectoriel est convexe ; il en est de même de tout sous-espace affine.
- Dans un espace vectoriel normé (réel ou complexe), toute boule est convexe, qu'elle soit ouverte ou fermée.





Jauge d'un ensemble convexe
Soit K une partie convexe de E contenant l'origine. On appelle jauge de K (relativement à l'origine) la fonction pK de E dans

-

- ou



Théorème
- La jauge pK d'un convexe K contenant l'origine vérifie les propositions suivantes:
- (i)Si


- (ii)




Démonstration
- (i): Ce résultat est immédiat.
- (ii):Soient 2 vecteurs





Sinon:




. En utilisant la convexité, la conjonction de ces 2 propositions entraîne:


Donc

Théorème
- Si l'espace E est réel, la jauge d'un convexe symétrique K (par rapport à 0) et absorbant est une semi-norme sur E.
- Si l'espace E est complexe, la jauge d'un convexe K équilibré et absorbant est une semi-norme sur E.
Démonstration
Tout d'abord K étant absorbant il en résulte immédiatement que

De plus, en utilisant le théorème précédent il suffit de vérifier que

- Si l'espace E est réel, la symétrie de


- Si l'espace E est complexe.


Ecrivons





Projection sur un convexe fermé d'un espace de Hilbert
Soient







Cette solution est caractérisée par l'inéquation variationnelle :

De plus la projection :

| Articles de mathématiques en rapport avec la convexité |
| Concavité | Enveloppe convexe | Fonction convexe | Inégalité de Jensen | Théorème de Carathéodory | Théorème de Helly | Point extrémal d'un convexe | Théorème de Krein-Milman | Théorème de Radon | Théorème de Tverberg | Théorème des quatre sommets | Polyèdre | Théorème de séparation des convexes |

















































