JIMO - Définition
La liste des auteurs de cet article est disponible ici.
Déroulement prévu de la mission
À partir de mai 2015, trois lancements devaient être effectués pour mettre en LEO et assembler les deux étages de transferts et la sonde. Les étages de transfert devaient propulser la sonde hors du voisinage terrestre au cours de la fenêtre de lancement s'étendant de fin octobre 2015 à mi-janvier 2016.
Pendant le mois suivant cette première manœuvre, la sonde devait être rendue opérationnelle par le déploiement de ses structures, l'activation et les tests du réacteur et des propulseurs. Le transfert interplanétaire aurait alors duré jusqu'en avril 2021, période pendant laquelle les moteurs ioniques auraient fonctionné les 2/3 du temps.
Arrivé dans la zone d'influence de Jupiter, la navigation de la sonde serait devenue plus complexe et délicate. Dans cet environnement gravitationnel perturbé par l'interaction de nombreux corps, la durée de vie d'une orbite autour d'une lune est courte et dans l'absence ou l'incapacité de corrections, la sonde aurait été condamnée à s'écraser au bout de peu de semaines. En revanche, la dynamique de ces nombreux corps offre beaucoup d'opportunités de manœuvres par assistance gravitationnelle, ainsi il était prévu qu'avec cette technique l'ensemble des transferts entre les satellites aurait économisé 80% de la quantité de carburant théoriquement nécessaire à cette partie de la mission. La capture de la sonde par sa première destination Callisto aurait duré presque un an (jusqu'en février 2022).
La sonde aurait étudié Callisto puis Ganymède pendant 3 mois chacune, et enfin Europe pendant 1 mois. Elle aurait observé Io chaque fois que sa position et les contraintes de la mission primaire le permettaient. L'ordre de visite des lunes en partant de la plus extérieure permet de minimiser l'irradiation des instruments par Jupiter durant le cycle de vie de la sonde.
À la fin de sa mission en septembre 2025, le véhicule devait être parqué sur une orbite stable autour d'Europe malgré la proximité de Jupiter.
Conception de la sonde
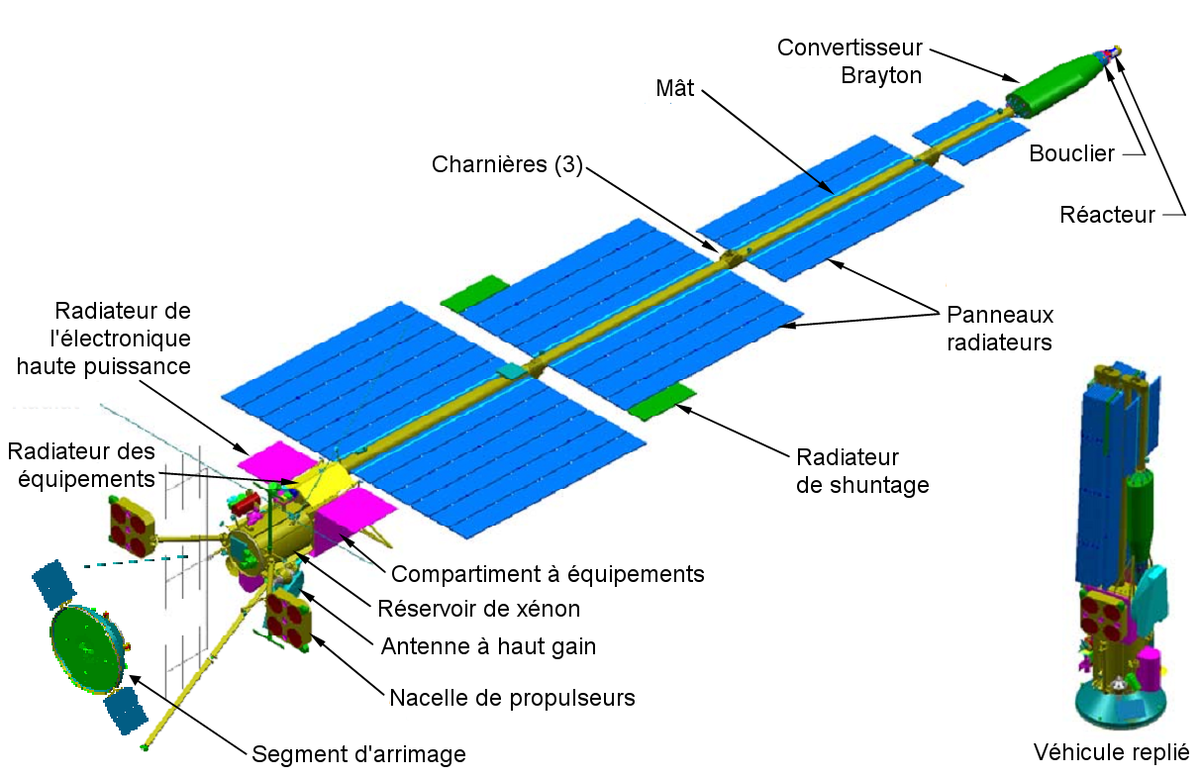
La sonde est structurée suivant un long mât qui porte le réacteur à une extrémité et les propulseurs et instruments scientifiques à l'autre bout. Entre les deux s'étendent les panneaux de dissipation de la chaleur du réacteur. Le mât possède trois charnières qui permettent de replier le véhicule et le faire contenir dans une coiffe de fusée de 4,5 m de diamètre par 26 m de hauteur.
Source d'énergie
Quand le projet fut arrêté, il n'y avait pas eu de choix définitif du type de réacteur qui devait être utilisé sur la sonde, mais parmi ceux proposés par le DOE, la configuration suivante était la plus plausible.
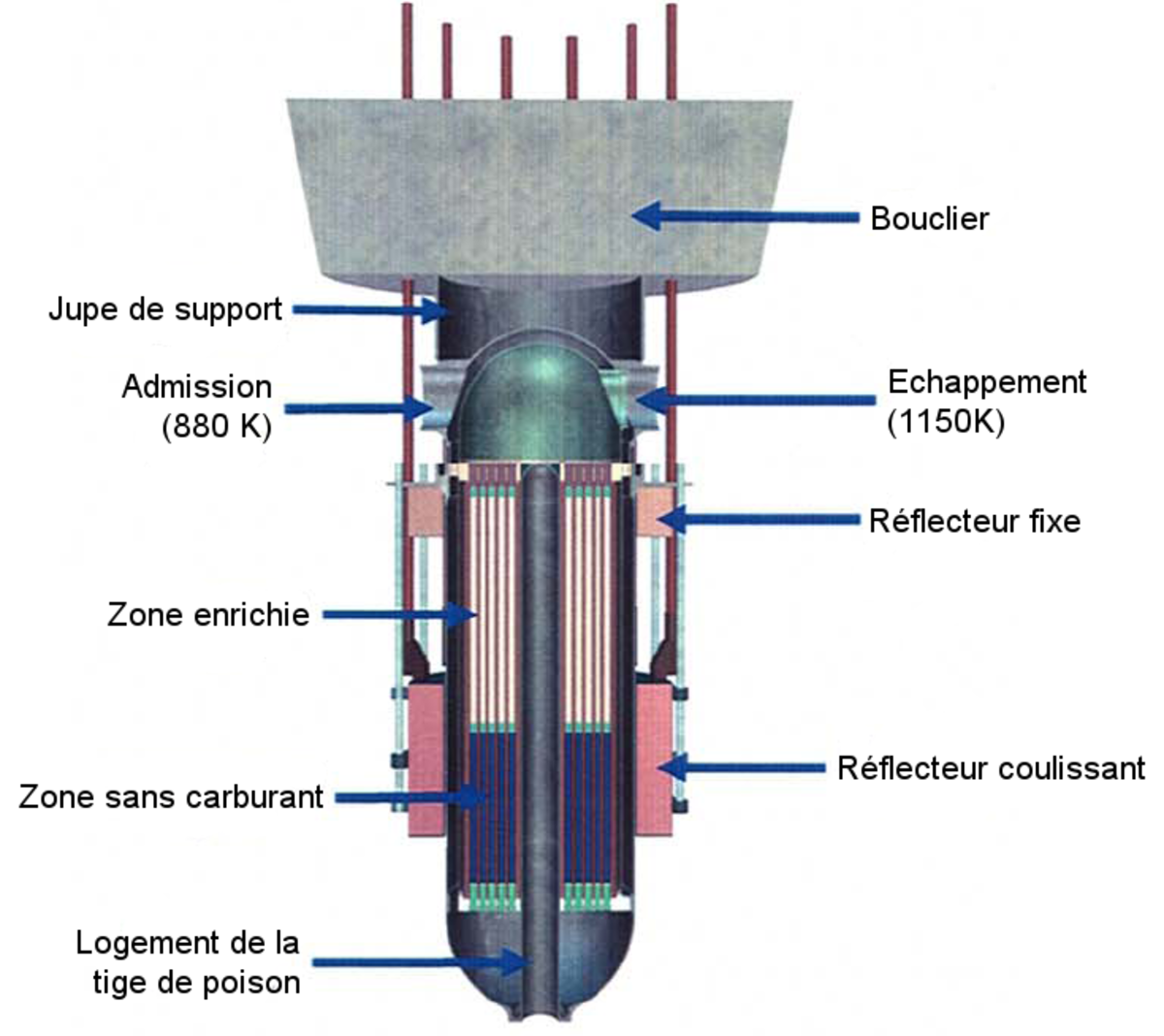
Le réacteur est situé tout à l'avant du véhicule, caché derrière un bouclier en matériau absorbeur de neutrons et en tungstène (absorbeur de rayons gamma) qui protège la zone conique aplatie (6° × 12°) dans laquelle est située le reste du véhicule.
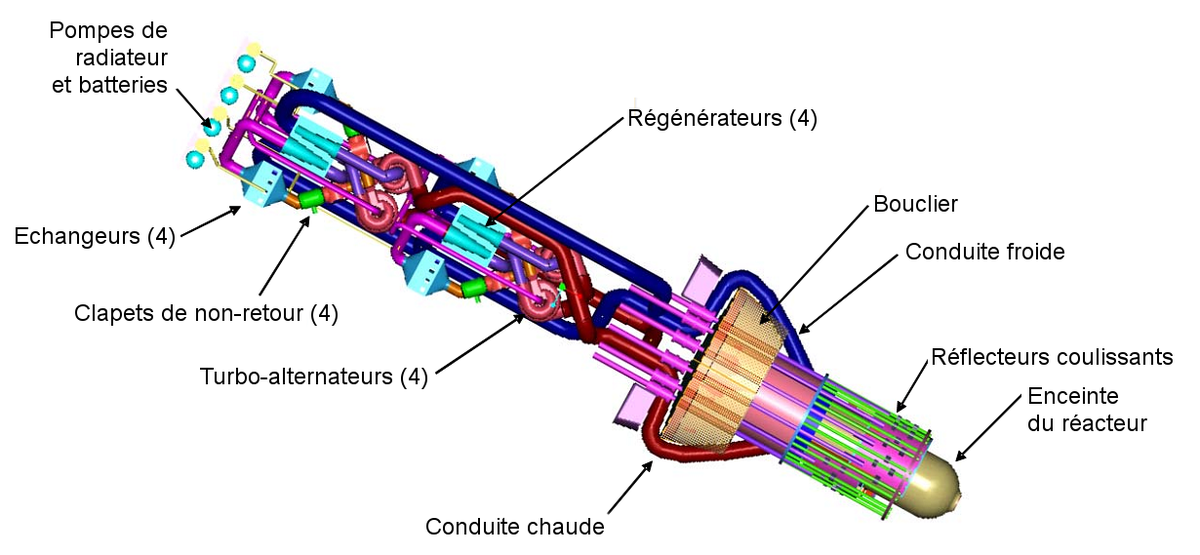
Il fonctionne en spectre rapide et sa réactivité est régulée par des réflecteurs coulissants commandés par des tiges traversant le bouclier. Il est alimenté pour pouvoir fournir 1 MW thermique pendant 15 ans.
Il est refroidi par un circuit de gaz couplé directement à quatre convertisseurs (deux actifs et deux de secours) qui fonctionnent en cycle de Brayton fermé : le mélange hélium-xénon sort du réacteur à 1150 K, entraîne une turbine, passe dans un récupérateur, puis un échangeur avec le circuit du radiateur, il passe ensuite par une turbopompe qui le renvoie dans le récupérateur et dans le réacteur. La pompe et la turbine sont couplées par le même axe de rotation sur lequel se trouve aussi un alternateur qui génère jusqu'à 100 kW de puissance électrique.
De l'autre côté de l'échangeur, le circuit du radiateur mû par une pompe électrique fait circuler de l'eau ou du NaK dans les 532 m2 de panneaux disposés le long du mât dans l'ombre du bouclier.
Le réacteur est entouré d'une protection contre les micrométéorites. Lors du lancement, il est en plus emballé dans une coque en titane et composite carbone-phénolique, et une tige de poison neutronique est insérée dans son cœur, ceci permet d'éviter la contamination de l'environnement terrestre en cas de rentrée atmosphérique accidentelle et d'immersion. Cependant, les effets d'un impact au sol n'avait pas encore été évalués et contrecarrés. Ces sécurités sont larguées après l'éjection de la sonde hors de l'orbite terrestre et avant la mise en route du réacteur.
Moteurs
Les propulseurs ioniques testés, nommés HiPEP (High Power Electric Propulsion) et NEXIS (Nuclear Electric Xenon Ion System), dérivent des propulseurs ioniques électrostatiques à grille tel que celui utilisé sur Deep Space 1. HiPEP diffère par sa technique d'ionisation du gaz fondée sur l'induction par micro-ondes, et NEXIS par l'homogénéité de son plasma et ses grilles en carbone. Ces variations offrent une notable amélioration de l'efficacité, de la puissance et de la durée de vie de ce type de moteur. Le modèle envisagé pour la sonde, nommé Heracles devait être conçu sur la base des résultats des tests effectués sur ces deux modèles précurseurs. Son impulsion spécifique était prévue à 6 000 s.
Propulseur HiPEP | 
HiPEP en fonctionnement | 
Propulseur NEXIS | 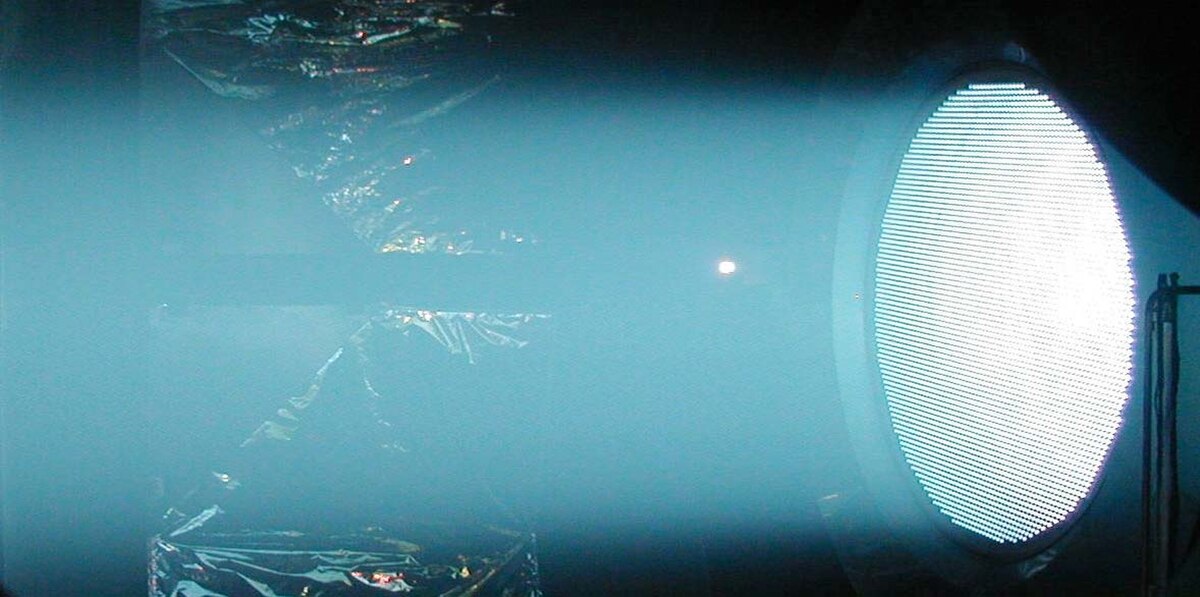
NEXIS en fonctionnement |

Les propulseurs devaient être disposés dans deux nacelles contenant chacune 4 moteurs ioniques, 3 gros propulseurs à effet Hall (fournissant une poussée additionnelle mais moins efficace dans certains cas critiques) et 6 petits propulseurs à effet Hall pour le contrôle d'attitude. Ces nacelles sont reliées au véhicule par des montures articulées permettant d'obtenir une poussée vectorielle, assurant ainsi en partie le contrôle d'attitude à moindre frais.
La faible poussée des réacteurs et la trajectoire de transfert en spirale qui en résulte offrent plus d'opportunités de départ et une moindre sensibilité aux écarts par rapport à la date optimale dans chaque fenêtre de lancement.
Étages de transfert
La forte impulsion spécifique permet de réduire la masse de carburant (ou d'augmenter la charge utile), mais à cause de la faible poussée, les manœuvres d'évasion ou de capture dans les champs gravitationnels intenses sont alors très coûteux en temps. Afin de ne pas passer des mois en spirale autour de la Terre, le départ est assuré par deux étages de transfert à propulsion chimique.
Le véhicule est donc mis en LEO par trois lancements avec un lanceur encore non conçu de 40 t de capacité de mise en orbite basse. L'assemblage se fait ensuite par arrimage automatique. La sonde possède au départ un segment d'amarrage assurant les fonctions précédant son déploiement et sa mise en route (alimentation électrique par panneaux solaires, liaison radio UHF et contrôle d'attitude par propulseurs à hydrazine). Ce segment est largué avant le transit interplanétaire.
Instruments
À la terminaison du projet, les objectifs scientifiques et les capacités offertes par le véhicule étaient définis mais les instruments n'étaient pas choisis. Ce choix devait être arrêté en janvier 2008 après consultation de la communauté scientifique et des sous-traitants. Néanmoins, sur la base de l'étude JIMT, certains appareils étaient fortement pressentis.
Le cahier des charges scientifique exigeait que les trois lunes visitées soient cartographiées par caméras et télescope avec une résolution de 25 cm/pixel, et Io avec 1 km/pixel. La topographie en relief devait être réalisée par un radar à synthèse d'ouverture opérant avec une puissance de 5 kW à 35 GHz, la résolution verticale obtenue étant inférieure au mètre.
Le sondage de l'intérieur des croûtes glacées des satellites devait être fait par un radar à forte puissance, constitué de trois antennes Yagi, capable d'observer la stratigraphie glacière et l'interface avec l'océan jusqu'à 20 km de profondeur.
Des spectromètres de masse devaient analyser la matière neutre et ionisée éjectée depuis la surface des lunes visitées. Dans ce type d'expérience, il est préférable d'analyser la matière neutre car la matière ionisée est mise en mouvement par le champ magnétique local et il est alors difficile de corréler sa composition chimique avec son emplacement d'origine. La matière neutre, si elle est « immobile » par rapport à son lieu de production, est en revanche nettement moins abondante. Il a alors été proposé de provoquer l'éjection de matière en ablatant la surface des lunes par laser ou par le flux de xénon obtenu en pointant les moteurs de la sonde vers la surface.
La communication avec la Terre située à plus de 6 ua devait pouvoir transférer 50 Mbit/s de données. La puissance requise pour un tel débit, si elle est rendue disponible par la source d'énergie nucléaire, dépasse largement la capacité d'un tube à ondes progressives, c'est pourquoi le système de communication devait être couplé soit à un groupe de quatre antennes, soit à un combinateur de tubes non encore conçu.
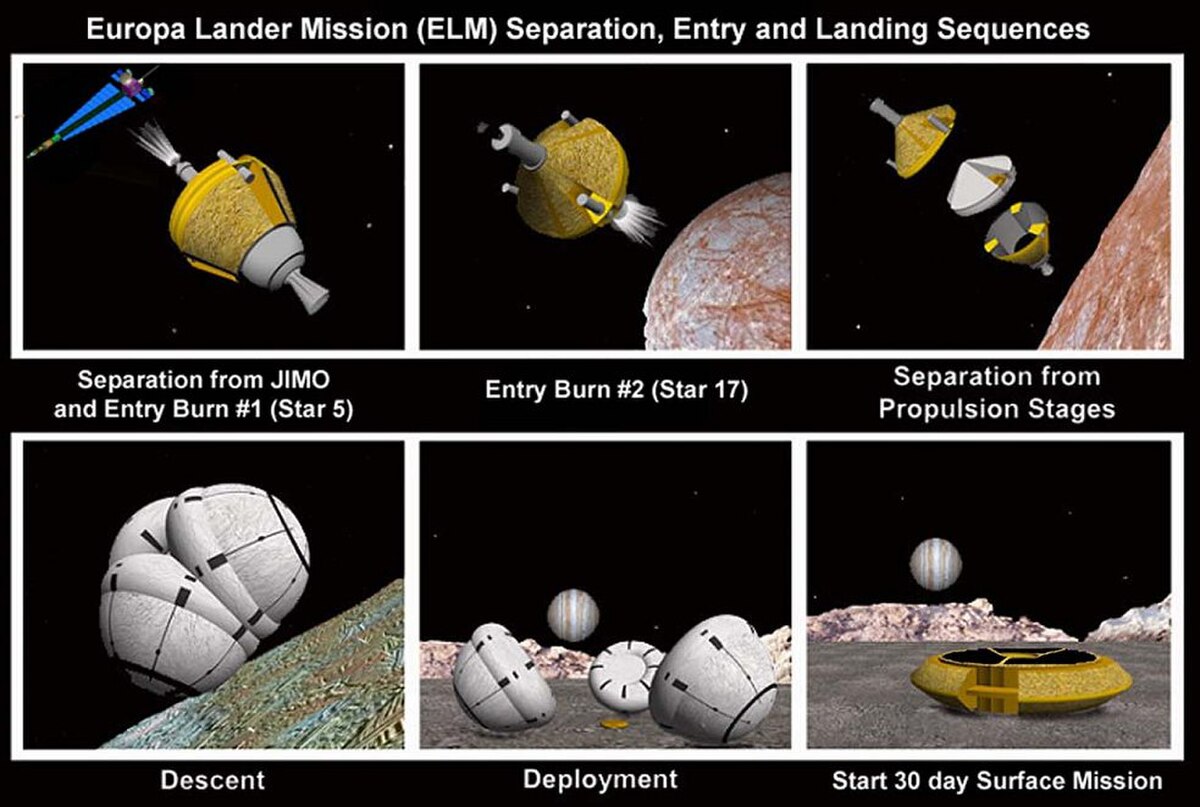
Europe représentant l'objectif scientifique le plus important, 25% de la charge utile devait être consacrée à une expérience de surface ESSP (Europa Surface Science Package) comprenant un atterrisseur ELM (Europa Lander Mission). Il aurait déposé un module de 38,7 kg (230 kg en comptant le poids de ses fusées et airbags d'atterrissage) alimenté par un petit RTG. Le module aurait envoyé ses mesures pendant les 30 jours d'orbite de la sonde autour de la lune.
Il fut proposé d'adjoindre à la mission un module de descente dans l'atmosphère jovienne et éventuellement un satellite relais. Le module devait fonctionner jusqu'à la pression de 100 atmosphères, beaucoup plus loin que celui largué par la sonde Galileo en 1995 qui fut détruit à la pression de 23 atm. Mais cet objectif supplémentaire aurait requis trop de modifications du projet initial ou des objectifs primaires.

















































