Dynamique des cycles - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
La dynamique des cycles est la science du mouvement des bicyclettes et motos et des éléments qui les composent, causé par les forces qu'ils subissent. La dynamique est une branche de la mécanique classique, elle-même part de la physique. Les bicyclettes et les motos sont toutes deux des véhicules à trajectoire unique, ce qui rend les caractéristiques de leur mouvement fondamentalement similaires.
Les mouvements du vélo qui présentent un intérêt sont le balancement, la direction, le freinage, l'utilisation de la suspension, et la vibration. Des expériences et l'analyse ont montré qu'un vélo tenait debout lorsqu'il était dirigé de façon à maintenir son centre de gravité au-dessus des roues. Cette direction est généralement le fait d'un cycliste, ou dans certaines circonstances du vélo lui-même. L'idée longtemps en vigueur selon laquelle l'effet gyroscopique est la principale force de stabilisation du vélo a été réfutée .
Même si se maintenir droit peut être l'objectif premier du débutant, un vélo doit s'incliner pour maintenir son équilibre dans un virage : plus la vitesse est importante, ou plus l'angle de virage est faible, plus elle doit s'incliner. Cela permet de compenser la force centrifuge du virage par la force de gravité due à l'inclinaison. Au cours d'un freinage, selon l'emplacement du centre de gravité conjoint du vélo et du cycliste par rapport au point de contact entre la roue avant et le sol, la roue avant peut déraper, ou le vélo et le cycliste passer par-dessus la roue avant.
Histoire

L'histoire de l'étude de la dynamique des cycles est presque aussi ancienne que la bicyclette elle-même. Elle se nourrit de contributions de scentifiques célèbres comme William Rankine, Paul Émile Appell ou Francis Whipple. Au début du XIXe, Karl von Drais lui-même, reconnu comme l'inventeur du deux-roues appelé vélocipède ou draisienne, montre qu'un cycliste peut équilibrer son engin en guidant la roue avant. Avant la fin du XIXe, Emmanuel Carvallo et Francis Whipple montrent à l'aide de la dynamique des corps rigides que certaines bicyclettes sûres étaient capables de s'équilibrer elles-mêmes si elles se déplaçaient à une allure adéquate. La paternité de l'idée de différencier l'axe de direction de l'axe vertical, qui permit cette évolution, est incertaine. En 1970, David Jones publie un article dans Physics Today qui montre que les effets gyroscopiques ne sont pas nécessaires pour équilibrer une bicyclette. En 1985, Robin Sharp publie un ouvrage sur le comportement mathématiques des cycles et a continué à travailler sur ce sujet jusqu'aujourd'hui en compagnie de David Limebeer, son collègue de l'Imperial College de Londres. En 2007, Meijaard, Papadopoulos, Ruina, et Schwab publient les équations du mouvement cannoniquement linéarisées, dans les Proceedings of the Royal Society A, ainsi que leur démonstration selon deux méthodes distinctes.
Équilibre
Un vélo se maintient droit lorsqu'il est dirigé de façon à ce que les forces de réaction du sol compensent exactement toutes les autres forces qu'il subit : gravité, inertie, force centrifuge en cas de virage et force aérodynamique en cas de souffle de côté. La direction peut être le fait d'un cycliste ou, dans certaines circonstances, du vélo lui-même. Cet auto-équilibre est alors provoqué par la combinaison de plusieurs effets qui dépendent de la géométrie, de la répartition du poids, et de la vitesse d'avancement de la bicyclette. Les pneus, la suspension, l'amortissement de la direction et la flexibilité du cadre peut aussi influencer ce phénomène, en particulier dans le cas des motos.
Si la direction d'un vélo est bloquée, il devient à peu près impossible d'en préserver l'équilibre pendant la conduite. Cependant, si l'effet gyroscopique de la rotation des roues du vélo est compensé par l'ajout de roues contre-rotatives, il reste aisé d'assurer l'équilibre du véhicule.
Vitesse de la bicyclette
Le cycliste transmet du couple au guidon afin de tourner la roue avant, ce qui permet de contrôler l'inclinaison et de préserver l'équilibre. À une vitesse élevée, même un angle de direction faible provoque un déplacement latéral rapide des points de contact au sol ; à une vitesse plus faible, il faut utiliser des angles de direction plus grands pour obtenir le même effet aussi rapidement. De ce fait, il est généralement plus aisé de maintenir l'équilibre à vitesse élevée.
Localisation du centre de gravité
Plus le centre de gravité combiné du vélo et du cycliste se trouve à l'avant (proche de la roue avant), moins la roue avant doit bouger latéralement pour conserver l'équilibre. Inversement, plus le centre de gravité se trouve à l'arrière (proche de la roue arrière), plus le mouvement latéral de la roue avant doit être important pour préserver l'équilibre de la bicyclette. Ce phénomène peut être observé particulièrement sur les vélos couchés et les choppers, dont les roues sont particulièrement écartées. Il peut aussi s'avérer important sur les routières qui transportent un chargement important au-dessus, ou même derrière la roue arrière.
Les vélos sont également des exemples de pendules inversés. De la même manière qu'un balai (avec la brosse en haut) est plus facile à équilibrer qu'un crayon, un vélo haut, caractérisé par un centre de gravité plus élevé, sera peut-être plus facile à équilibrer qu'un vélo plus petit parce qu'il s'inclinera plus lentement.
À l'arrêt, un cycliste peut avoir l'impression inverse : une bicyclette plus lourde demande plus d'effort pour être maintenue droite, lorsqu'elle est arrêtée par la circulation par exemple, qu'une autre bicyclette aussi grande, mais avec un centre de gravité plus bas. C'est un exemple de levier vertical de seconde classe. Une force faible imprimée à l'extrémité du levier (le siège ou le guidon pour un vélo) déplace plus facilement une masse importante si celle-ci est plus proche du point d'appui, au contact entre les pneus et le sol. C'est pourquoi il est conseillé aux cyclotouristes de transporter leur chargement bas sur leur vélo, notamment en laissant pendre leurs sacs de part et d'autre de leur porte-bagages.
Chasse
La chasse est un autre facteur qui influence la maniabilité du vélo. Il s'agit de la distance entre le point de contact de la roue avant avec le sol et l'intersection du sol et de l'axe de direction, qui est l'axe autour duquel l'ensemble du mécanisme de direction pivote (fourche, guidon, roue avant). Sur une bicyclette traditionnelle, où l'axe de direction est en retrait de la verticale, la chasse fait tourner la roue avant dans la direction dans laquelle le vélo penche, indépendamment de sa vitesse. Ce phénomène est aisément observable en poussant un vélo à l'arrêt d'un côté donné. La roue avant devrait tourner également dans cette direction, du fait de la gravité.
Plus un vélo a de chasse, plus il est stable. Les vélos à chasse négative (où le point de contact est en avant de l'intersection de l'axe de direction avec le sol) peuvent être conduits, mais sont extrêmement instables. Inversement, les vélos qui accusent une chasse trop importante virent plus difficilement. En général, les vélos de course ont plus de chasse que les vélos de tourisme ou les VTT. Dans le cas des VTT, une chasse moins importante permet d'accroître la précision de la trajectoire, et de préserver l'équilibre du cycliste lorsque sa roue avant heurte des obstacles. Les vélos de tourisme sont construits avec une chasse faible afin de permettre au cycliste de contrôler son vélo lorsqu'il est particulièrement chargé et possède un centre de gravité plus bas. En conséquence, un vélo de tourisme non chargé peut paraître instable lorsqu'il n'est pas chargé. Sur les vélos, le cintre de la fourche, qui prend la forme d'une courbe à l'avant de l'axe de direction en bas de la fourche, est utilisée pour diminuer la chasse. In motorcycles, rake refers to the head angle instead, and offset created by the triple tree is used to diminish trail ⇔ Sur les motos, on appelle cintre l'angle avant, et ....
La chasse est une fonction de l'angle avant, du cintre et de la taille de la roue. Cette relation s'exprime par la relation suivante:

où R est le rayon de la roue, A l'angle avant mesuré dans le sens des aiguilles d'une montre, et C le cintre. La chasse peut être accrue en accroissant la taille de la roue, en réduisant l'angle avant, ou en réduisant le cintre de la fourche.
Une étude empirique de Whitt et Wilson a révélé que :
- les vélos de tourisme ont un angle avant compris entre 72° et 73° et une chasse de 43,0 à 60,0 mm
- les vélos de course ont un angle avant compris entre 73° et 74° et une chasse de 28,0 à 45,0 mm
- les vélos de piste ont un angle avant de 75° et une chasse de 23,5 à 37,0 mm
Répartition du poids du mécanisme de direction
Un autre facteur susceptible de contribuer à l'équilibre d'un vélo traditionnel est la répartition de la masse dans le mécanisme de direction, qui est composé de la roue avant, de la fourche et du guidon. Si le centre de gravité du mécanisme de direction se trouve à l'avant de l'axe de direction, la force de gravité fait tourner la roue dans la direction dans laquelle le vélo penche. Ce phénomène peut être observé en penchant un vélo à l'arrêt. La roue avant tourne généralement aussi dans cette direction indépendamment de toute interaction avec le sol D'autres paramètres, comme la fore-to-aft position ⇔ du centre de gravité ou sa hauteur contribuent aussi au comportement dynamique du vélo.
Effets gyroscopiques
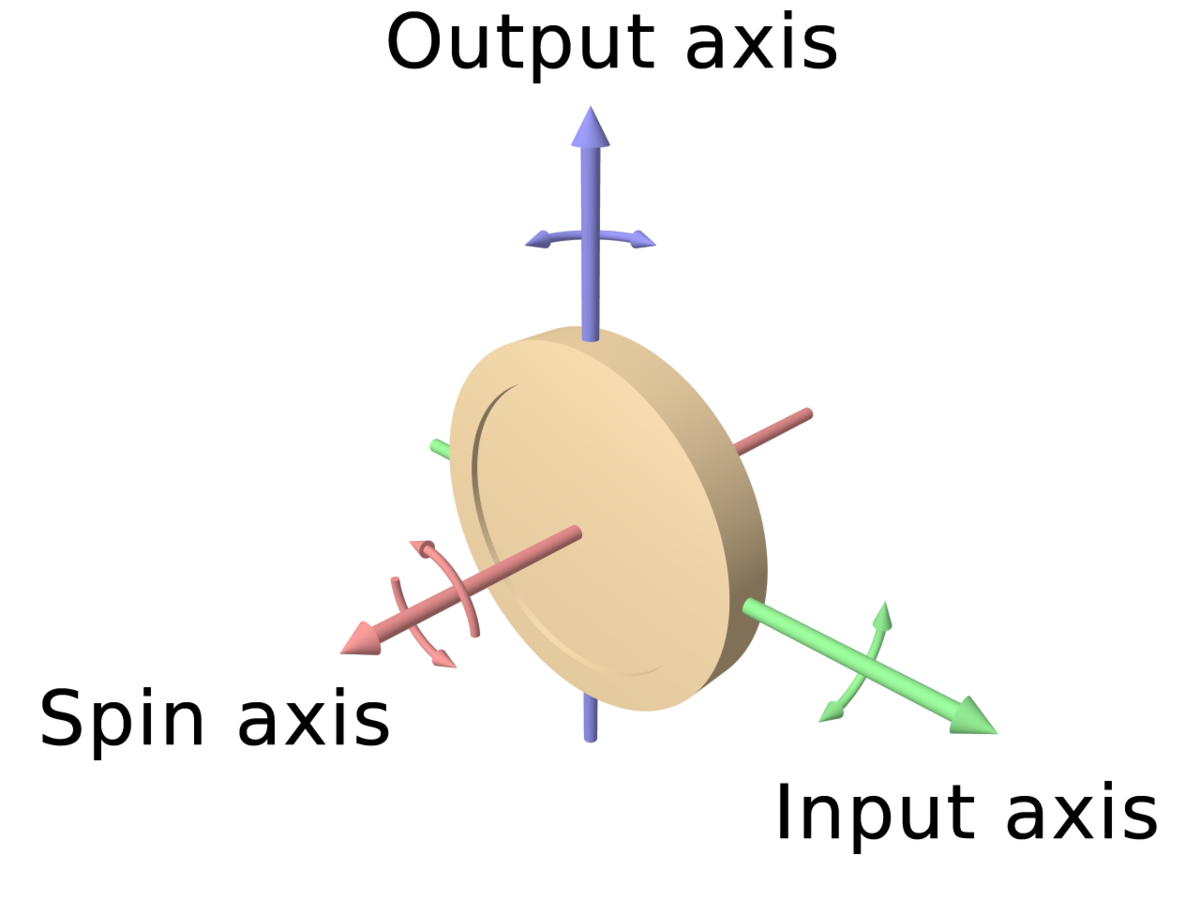
Dans la plupart des vélos, le rôle de l'effet gyroscopique est d'aider à tourner la roue avant dans la direction d'inclinaison. Ce phénomène s'appelle laprécession ,son ampleur est inversement proportionnel à la vitesse de rotation de l'objet. Au moins la roue avant tourne vite, au plus la précession est importante est vice-versa.vice-versa. A l'inverse de la roue avant, la roue arrière n'est pas soumise a ce phénomène a cause des frottements des pneu sur le sol, elle bascule donc de la même manière que si elle était a l'arrêt. Ainsi, les effets gyroscopiques n'empêche pas le basculement.
A faible vitesse, la précession de la roue avant est très forte, ce qui a pour effet de rendre la bicyclette incontrôlable avec une tendance à tourner trop fort (un genre de sur-virage), à se pencher de l'autre côté ce qui peut entrainer des oscillations et donc une chute. A haute vitesse, à l'inverse la précession est faible, cela rend la bicyclette difficilement manœuvrable: elle a tendance a "refuser" le virage. . Le temps caractéristique de cette instabilité est long ,de l'ordre de quelque seconde, ce qui la rend facile à contrer. AInsi, une bicyclette qui va vite peut sembler stable même s'il elle ne l'est pas en réalité et devient instable si elle n'est pas contrôlée.
Une autre contribution des effets gyroscopique est la création d'un moment (de roulis) par la roue avant lors d'un contre braquage. Cela permet au pilote de lancer un virage rapidement. Par exemple pour un virage a gauche, le pilote commence d'abord par virer à droite, ceci a pour effet de faire pencher la machine a gauche ce qui aide le pilote a engagé son virage.
Self-stability
Entre les deux modes d'instabilité mentionnés plus haut et influencé par tous les paramètres pré-cités( empatement,répartition des masse, effets gyroscopiques,...), il peut y avoir une plage de vitesse où ces effets équilibrent un vélo . Cependant, même sans auto-stabilité, une bicyclette peut être conduit en le maintenant dans l'axe de ses roues. Il est a noter que les effets mentionnés ci-dessus qui combinés peuvent assurer l'auto-stabilité peuvent être surpassés par des facteurs additionnels comme les frottements dans le jeu de direction ou la raideur des câbles de commandes.. Cette vidéo montre une bicyclette auto-stable sans pilote.

















































