Programme Apollo - Définition
La liste des auteurs de cet article est disponible ici.
Le déroulement d'une mission lunaire type
Les fenêtres de lancement et le site d'atterrissage
Les six missions lunaires Apollo ont été programmées pour que le module lunaire atterrisse au tout début du jour lunaire (qui dure 28 jours terrestres). Les astronautes bénéficient ainsi d'une lumière rasante pour le repérage du terrain à l'atterrissage (entre 10 et 15° d'élévation au-dessus de l'horizon selon les missions) et de températures relativement modérées : la température au sol passe progressivement de 0 à 130 °C entre le lever du Soleil et le moment où le Soleil culmine au bout de 177 heures terrestres. Compte tenu de ces conditions, pour chaque lieu d'atterrissage, la fenêtre de lancement de la fusée Saturn était réduite à 1 jour par mois pour un site donné.
Le site retenu est toujours situé sur la face visible de la Terre pour que les communications entre le vaisseau et la Terre ne soient pas interrompues ; il n'est pas trop éloigné de la bande équatoriale de la Lune pour limiter la consommation de carburant que nécessiterait un déport du vaisseau vers des latitudes plus élevées.
La mise en orbite terrestre
La fusée décolle systématiquement depuis le Pad 39 du centre spatial Kennedy. Le lancement des 3 000 tonnes de la fusée est particulièrement spectaculaire : les 5 moteurs du premier étage sont allumés simultanément consommant 15 tonnes de carburant chaque seconde puis la fusée, qui est retenue par des pinces, est lâchée dès que les ordinateurs ont vérifié que la poussée des moteurs a atteint sa puissance nominale. La fusée s'élève d'abord très lentement, mettant près de 10 secondes à se dégager de la tour de lancement. La séparation du premier étage S1-C intervient 2 minutes et demi après le lancement à une altitude de 56 km alors que la fusée a atteint une vitesse de Mach 8 (10 000 km/h). Peu après, les moteurs-fusée du deuxième étage S-II s'allument : la jupe inter-étages se détache et la tour de sauvetage est éjectée car le vaisseau spatial est suffisamment haut pour pouvoir retomber sans son aide en cas d'interruption de la mission. Le deuxième étage est à son tour largué alors que la fusée atteint une vitesse de 24 000 km/h et une altitude de 185 km. Le troisième étage S-IVB est alors mis à contribution durant 140 secondes pour placer l'ensemble de la fusée restante sur une orbite circulaire de 180 km onze minutes et demi après le décollage.
De l'orbite terrestre à l'orbite lunaire

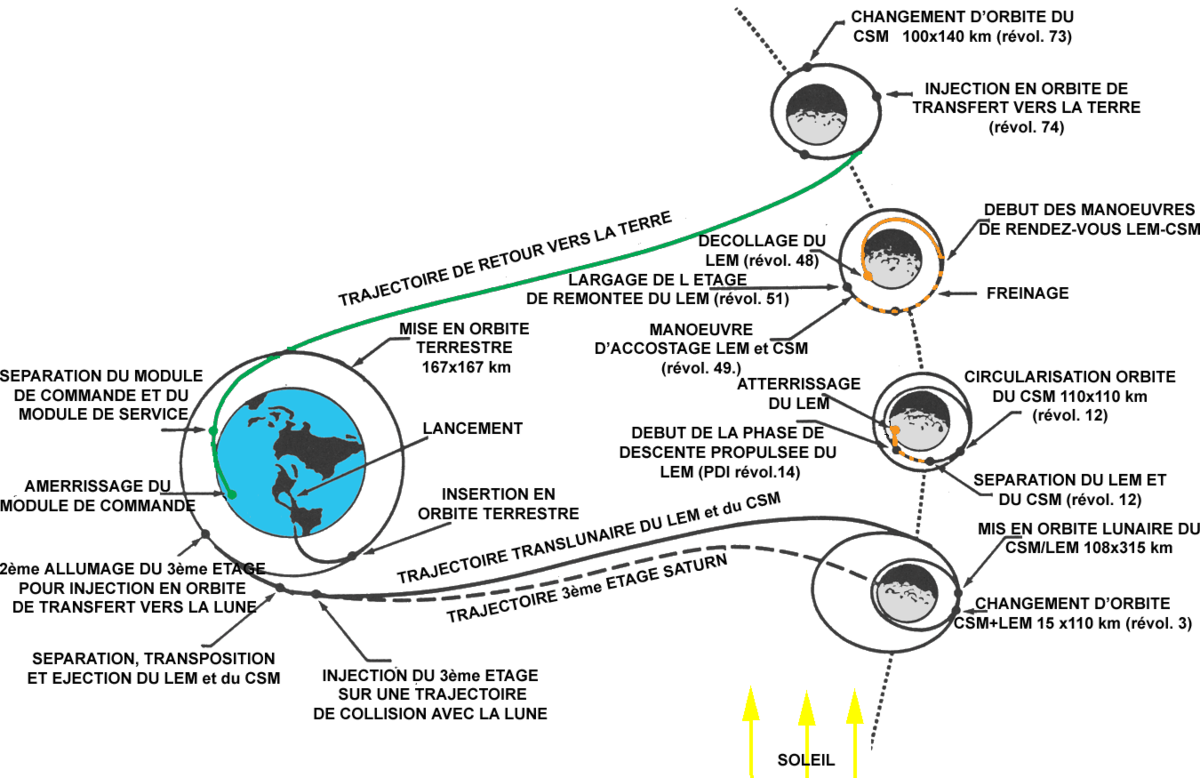
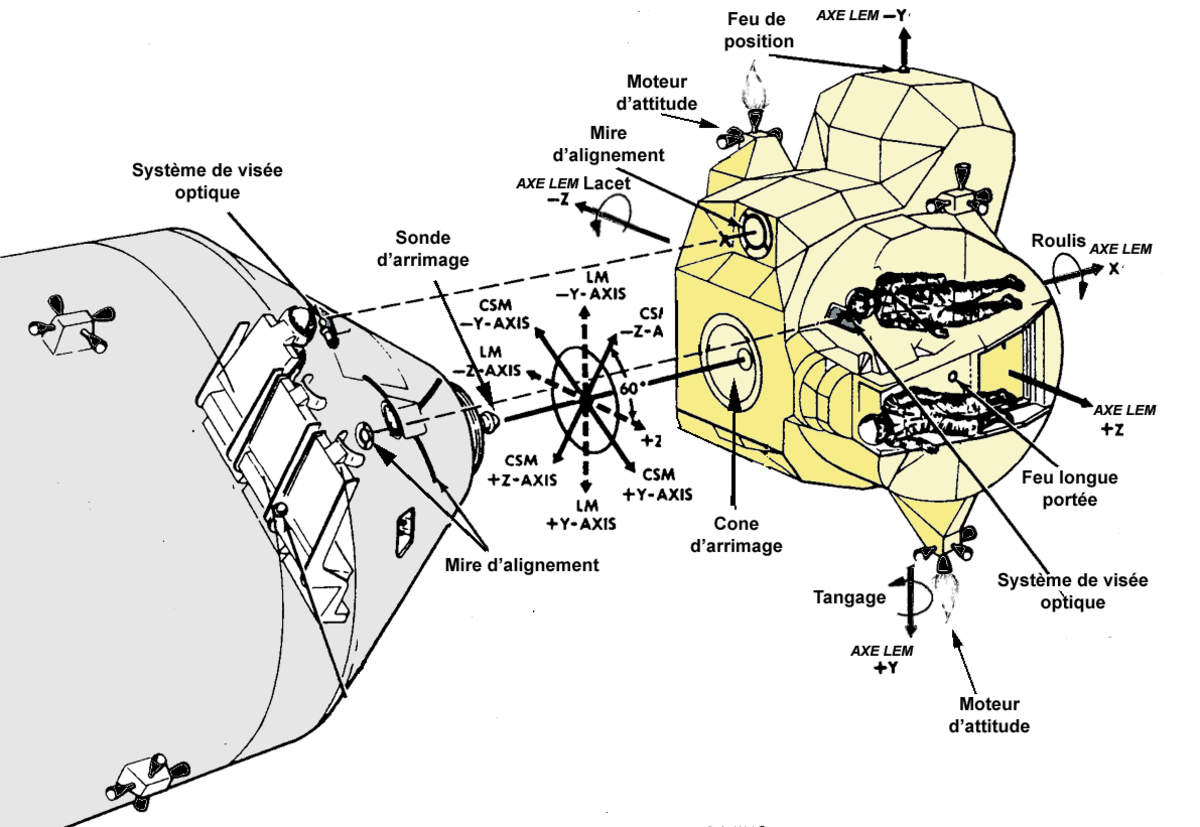
Une fois placés en orbite basse, les vaisseaux Apollo (LEM et modules de Commande et de Service) ainsi que le troisième étage de la fusée effectuent un tour et demi autour de la Terre puis le moteur du troisième étage est rallumé pour injecter l'ensemble sur une orbite de transfert vers la Lune. L'injection se traduit par une augmentation de la vitesse de 3 040 m/s (10 000 km/h). Peu après la fin de la poussée, le Module de Commande et de Service (CSM) se détache du reste du train spatial puis pivote de 180° pour venir repêcher le LEM dans son carénage. Après avoir vérifié l'arrimage des deux vaisseaux et pressurisé le LEM, les astronautes déclenchent par pyrotechnie la détente de ressorts situés dans le carénage du LEM : ceux-ci écartent le LEM et le CSM du troisième étage de la fusée Saturn à une vitesse d'environ 30 cm/s. Le troisième étage va alors entamer une trajectoire divergente qui, selon les missions le place en orbite autour du Soleil ou l'envoie s'écraser sur la Lune.
Durant le trajet de 70 heures vers la Lune, des corrections peuvent être apportées à la trajectoire du CSM et du LEM pour optimiser la consommation finale de propergols. Initialement, le déroulement d’une mission Apollo prévoyait une quantité relativement importante de carburant pour ces manœuvres. À l'usage, à peine 5 % de cette quantité sera consommée grâce à la précision de la navigation. Le train spatial est mis en rotation lente pour limiter l'échauffement des vaisseaux en réduisant la durée de l'exposition continue au Soleil.
Une fois arrivé à proximité de la Lune, le moteur du module de commande est allumé pour placer les vaisseaux en orbite en les freinant. Si ce freinage n'est pas réalisé, la trajectoire permet aux vaisseaux de revenir se placer en orbite terrestre après avoir fait le tour de la Lune sans utiliser leurs moteurs. Cette disposition sauvera d'ailleurs la mission Apollo 13. Un peu plus tard, le moteur du CMS est utilisé une deuxième fois pour placer les deux vaisseaux sur une orbite circulaire de 110 km d'altitude.
La descente et l'atterrissage sur la Lune
La descente sur la Lune repose en grande partie sur le système de guidage, navigation et contrôle (PGNCS : Primary Guidance and Control System) piloté par l'ordinateur embarqué (LGC). Celui-ci va d'une part, déterminer périodiquement la position et la trajectoire réelle du vaisseau en utilisant d'abord la centrale inertielle puis le radar d'atterrissage (fonction de navigation), et d'autre part, calculer la trajectoire à suivre en utilisant ses programmes et piloter, en fonction de tous ces éléments, la poussée et l'orientation des moteurs (fonction de guidage). Le pilote du LEM peut toutefois corriger l’altitude en cours à tout moment et, dans la dernière phase, reprendre complètement la main sur les commandes des moteurs. Mais seul le système de navigation et de pilotage permet, en optimisant trajectoire et consommation des ressources, de poser le LEM avant d'avoir épuisé tout le carburant.
L'abaissement de l'orbite
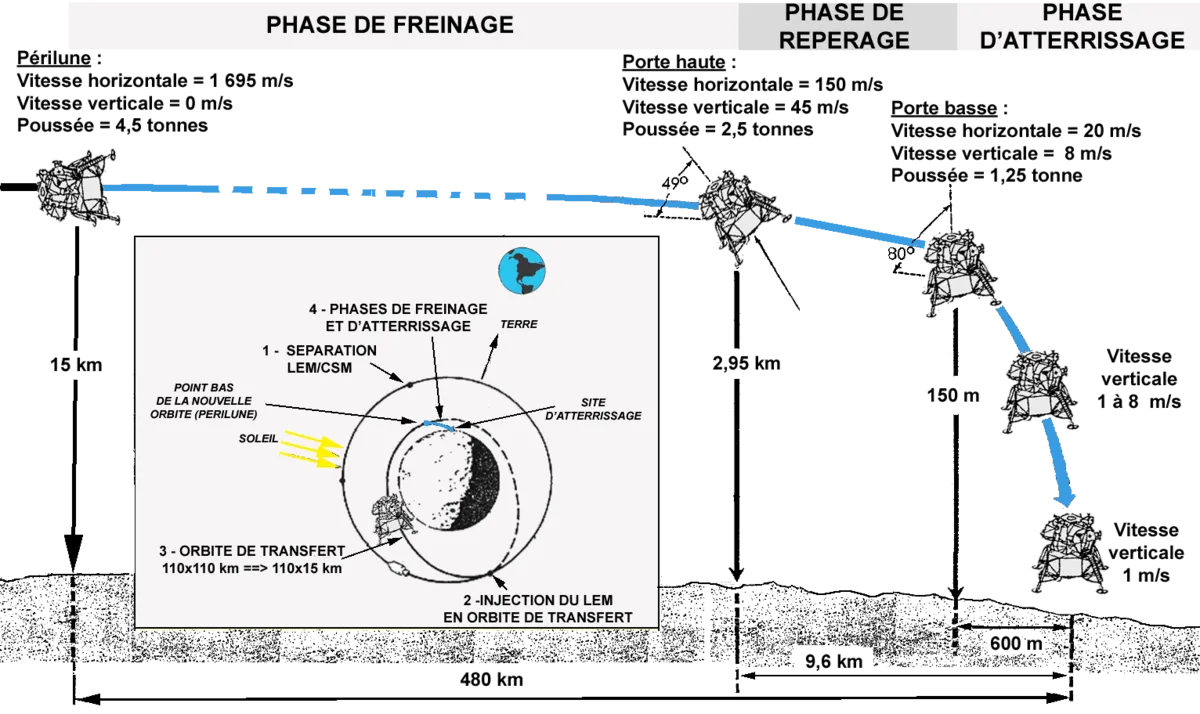
L'objectif de cette phase est d'abaisser l'altitude du LEM de 110 km à 15 km au-dessus du sol lunaire. À cet effet, son orbite circulaire est transformée en une orbite elliptique de 15 km sur 110 km. Cette phase permet de réduire la distance à parcourir jusqu’au sol lunaire à un faible coût en propergols (elle ne nécessite qu'une brève impulsion du moteur). La limite des 15 km a été retenue pour éviter que la trajectoire finale ne s'approche trop du relief.
Deux des trois astronautes de l'équipage prennent place dans le Module Lunaire pour descendre sur la Lune. Ils initialisent le système de navigation avant d'entamer la descente vers la Lune. Le LEM et le CSM se séparent avant que le moteur ne soit mis en marche (jusqu’à Apollo 12). Le changement d'orbite est initié lorsque le vaisseau spatial se situe aux antipodes (à une demi-orbite) du point où démarrera la phase suivante. Une fois que la distance entre le LEM et le module de commande est suffisante (une centaine de mètres), une petite accélération est d’abord imprimée par les moteurs contrôlant l'attitude pour plaquer le carburant du moteur de descente contre les vannes de distribution puis le moteur de descente est allumé brièvement pour freiner le LEM d'environ 25 m/s (90 km/h).
À partir d'Apollo 14, pour économiser les propergols de l'étage de descente, c'est le moteur du Module de Commande et de Service qui est sollicité pour abaisser l'orbite. Le CSM accompagne donc le LEM dans son orbite elliptique et s'en sépare avant que la descente propulsée ne démarre.
La descente propulsée

Cette phase est caractérisée par une action continue du moteur de descente. Elle démarre lorsque le LEM a atteint le point le plus bas de son orbite elliptique. Elle se décompose elle-même en 3 phases : la phase de freinage, la phase d'approche et la phase d'atterrissage.
La phase de freinage
La phase de freinage vise à réduire la vitesse du vaisseau de la manière la plus efficace possible : celle-ci va passer de 1 695 m/s (6 000 km/h) à 150 m/s (550 km/h). Le moteur est allumé à 10 % de sa puissance durant 26 secondes, le temps que le moteur s'aligne grâce à son cardan sur le centre de gravité du vaisseau, puis il est poussé au maximum de sa puissance. Le module lunaire qui au début de la trajectoire est pratiquement parallèle au sol va progressivement s'incliner tandis que sa vitesse de descente nulle au départ augmente jusqu'à 45 m/s en fin de phase. Lorsque le LEM se trouve à une altitude inférieure à 12-13 km, le radar d'atterrissage accroche le sol et se met à fournir des informations (altitude, vitesse de déplacement) qui vont permettre de vérifier que la trajectoire est correcte : jusqu'alors celle-ci était extrapolée uniquement à partir de l'accélération mesurée par la centrale à inertie. Une différence trop importante entre les données fournies par le radar et la trajectoire visée ou le non fonctionnement du radar sont des motifs d'interruption de la mission.
La phase d'approche
La phase d'approche démarre à 7 km du site visé alors que LEM est à une altitude de 700 mètres. Elle doit permettre au pilote de repérer la zone d'atterrissage et de choisir le lieu précis (dégagé) où il souhaite atterrir. Son point de départ est désigné sous le terme de « porte haute » (« high gate »), expression empruntée à l'aéronautique.
Le module lunaire est progressivement redressé en position verticale fournissant au pilote une meilleure vision du terrain. Celui-ci peut ainsi localiser le point d'atterrissage auquel conduit la trajectoire grâce à une échelle gravée sur son hublot graduée en degrés (Landing Point Designator, LPD) : l'ordinateur fournit à la demande l'angle sous lequel l'astronaute peut voir le lieu d'atterrissage sur cette échelle. Si celui-ci juge que le terrain n'est pas propice à un atterrissage ou qu'il ne correspond pas au lieu prévu, il peut alors corriger l'angle d'approche en agissant sur les commandes de vol par incrément de 0,5° dans le sens vertical ou 2° en latéral.
L'atterrissage sur le sol lunaire
Lorsque le module lunaire est descendu à une altitude de 150 mètres ce qui le place théoriquement à une distance de 700 mètres du lieu visé (point désigné sous le terme de low gate), démarre la phase d'atterrissage. Si la trajectoire a été convenablement suivie, les vitesses horizontale et verticale sont respectivement alors de 66 km/h et 18 km/h. La procédure prévoit que le pilote prenne la main pour amener le module lunaire au sol mais il peut, s'il le souhaite, laisser faire l'ordinateur de bord qui dispose d'un programme de pilotage pour cette dernière partie du vol. En prenant en compte les différents aléas (phase de repérage allongée de deux minutes, modification de la cible de dernière minute de 500 mètres pour éviter un relief, mauvaise combustion finale, jauge de propergol pessimiste), le pilote dispose d'une marge de 32 secondes pour poser le LEM avant l'épuisement des ergols. La dernière partie de la phase est un vol stationnaire à la manière d'un hélicoptère qui permet à la fois d'annuler toutes les composantes de vitesse mais également de mieux repérer les lieux. Des sondes situées sous les semelles du train d'atterrissage prennent contact avec le sol lunaire lorsque l'altitude est inférieure à 1,3 mètre et transmettent l'information au pilote. Celui-ci doit alors couper le moteur de descente pour éviter que le LEM ne rebondisse ou ne se renverse (la tuyère touche presque le sol).
Le séjour sur la Lune
Le séjour sur la Lune est rythmé par les sorties extra-véhiculaires : une unique sortie pour Apollo 11 mais jusqu’à trois sorties pour les dernières missions. Avant chaque sortie, les astronautes doivent faire le plein en eau et oxygène de leur système de survie portable puis enfiler leur tenue. Ils font ensuite le vide avant d’ouvrir l’écoutille qui donne accès à l’échelle.
Les outils et les instruments scientifiques sont sortis des baies de stockage de l’étage de descente puis sont déployés non loin du LEM ou à plus grande distance. À partir d’Apollo 14, les astronautes disposent d’une brouette puis dans le cadre des vols suivants du rover lunaire qui leur permet de s’éloigner d’une dizaine de kilomètres du LEM en transportant de lourdes charges. Le rover occupe une baie entière du module lunaire ; il est stocké en position repliée sur une palette que les astronautes abaissent pour libérer le véhicule. Le rover est déployé par un système de ressorts et de câbles agissant via des poulies et actionnés par les astronautes.
Avant de quitter la Lune, les échantillons géologiques placés dans des conteneurs sont hissés jusqu’à l’étage de remontée grâce à un palan. Le matériel qui n’est plus nécessaire (survie portable, appareils photos, etc.) est abandonné pour alléger au maximum l’étage de remontée.
La remontée et le rendez-vous avec le module de commande et de service
La phase de remontée doit permettre au LEM de rejoindre le module de commande resté en orbite. Cet objectif est atteint en 2 temps : l'étage du LEM décolle du sol lunaire pour se mettre en orbite basse puis ensuite à l'aide de poussées ponctuelles du moteur-fusée, il rejoint le module de commande.
Avant le décollage, la position précise du LEM au sol est entrée dans l'ordinateur afin de déterminer la meilleure trajectoire. L'instant du départ est calculé de manière à optimiser la trajectoire de rendez-vous avec le module de Commande. L'étage de descente reste au sol et sert de plate-forme de lancement. La séparation des deux étages est déclenchée avant le décollage par de petites charges pyrotechniques qui sectionnent les quatre points solidarisant les deux étages ainsi que les câbles et tuyauteries.
Le Module Lunaire suit d'abord une trajectoire verticale jusqu'à une altitude d'environ 75 mètres pour se dégager du relief lunaire puis s'incline progressivement pour rejoindre finalement à l'horizontale le périlune (point bas) d'une orbite elliptique de 15 km sur 67 km.
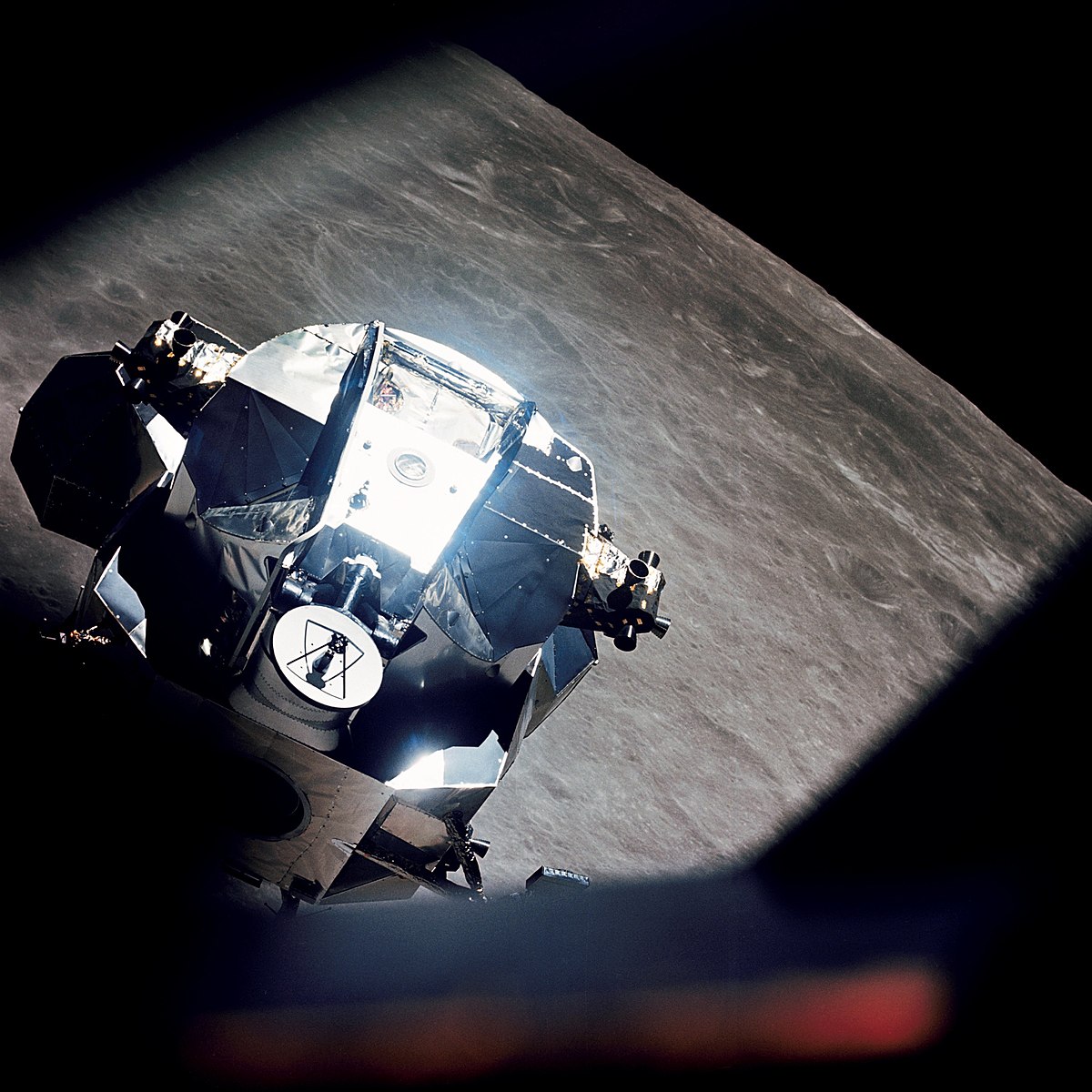
Un rendez-vous est alors effectué entre le CSM (piloté par le troisième membre d'équipage, le seul de la mission à ne pas aller sur la Lune) et le LEM en orbite lunaire. Après que les pierres lunaires ont été transférées, le LEM est libéré et lancé sur une trajectoire qui l'amènera à s'écraser sur la Lune. Le vaisseau spatial peut alors entamer son retour vers la Terre. Apollo 16 et Apollo 17 resteront en orbite une journée de plus pour réaliser des expériences scientifiques et larguer un petit satellite scientifique de 36 kg.
Le retour vers la Terre
Pour quitter l'orbite lunaire et placer le vaisseau spatial sur la trajectoire de retour vers la Terre, le moteur du module de commande et de service est sollicité durant deux minutes et demi après avoir soigneusement orienté le vaisseau ; il fournit un delta-v d'environ 1 000 m/s qui doit permettre au vaisseau de rejoindre l'orbite terrestre. C'est l'un des moments critiques de la mission car une défaillance du moteur ou une mauvaise précision dans l'orientation condamnerait les astronautes. Le moteur est allumé alors que le vaisseau se situe sur la face située à l'opposé de la Terre de manière à ce que la nouvelle trajectoire, une orbite de transfert fortement elliptique, frôle la surface de la Terre à 40 km d'altitude dans la position qu'elle occupera à l'arrivée du vaisseau. Le trajet de retour dure environ trois jours mais peut être un peu raccourci en optant pour une trajectoire plus tendue. Peu après l'injection sur le trajet de retour (trans-Earth Injection, TEI), une sortie extravéhiculaire est effectuée pour récupérer les films photographiques des caméras placés dans le module de service qui doit être largué avant l'entrée dans l'atmosphère terrestre.

De petites corrections sont effectuées au cours du trajet pour optimiser l'angle d'entrée dans l'atmosphère et le point de chute. Au fur et à mesure que le vaisseau se rapproche de la Terre, la vitesse du vaisseau, qui était tombée à 850 m/s à la limite de l'influence des champs de gravité de la Terre et de la Lune, s'accroît jusqu'à atteindre 11 km/s lorsque le vaisseau pénètre dans les couches denses de l'atmosphère ; celles-ci font sentir leur influence à compter de 120 km d'altitude. Peu avant de pénétrer dans l'atmosphère, le module de service du vaisseau est largué au moyen de systèmes pyrotechniques, emportant avec lui le moteur principal et la majorité des réserves d'oxygène et d'électricité. La rentrée dans l'atmosphère se fait sous un angle très précis fixé à 6,5° avec une tolérance de 1°. Si l'angle de pénétration est trop important, le bouclier thermique qui est porté normalement à une température de 3 000 °C durant la rentrée dans l'atmosphère, subit une température supérieure à celle pour laquelle il est conçu et la décélération est plus importante ; ces deux phénomènes pouvant entraîner la mort de l'équipage. Avec un angle inférieur, le vaisseau spatial peut rebondir sur la couche atmosphérique et repartir sur une longue trajectoire elliptique condamnant son équipage incapable de manœuvrer et ne disposant de très peu de réserves d'air.
Après une phase de décélération qui atteint 4 g, le vaisseau a perdu sa vitesse horizontale et descend pratiquement à la verticale. À 7 000 mètres d'altitude, la protection située à l'extrémité conique du vaisseau est éjectée et deux petits parachutes se déploient pour stabiliser la cabine et faire chuter sa vitesse de 480 à 280 km/h. À 3 000 mètres, trois petits parachutes pilotes sont déployés latéralement par des mortiers pour extraire les trois parachutes principaux en évitant qu'ils s'emmêlent. Le vaisseau percute la surface de l'océan à une vitesse de 35 km/h. Les parachutes sont immédiatement largués et trois ballonnets se gonflent de manière à éviter que le vaisseau reste la pointe sous l'eau. Une flottille comprenant un porte-avions ou un porte-hélicoptères est positionnée à l'avance sur la zone où doit amerrir le module de commande. Des avions sont chargés de localiser le point de chute tandis que des hélicoptères amènent sur place des plongeurs qui, montés sur des embarcations légères, récupèrent les astronautes et frappent des élingues sur le vaisseau pour qu'il puisse être hissé sur le pont du porte-aéronefs.

















































